Le chapitre 3
L'arithmétique des nombres réel
Tous les nombres possibles
Des nombres irrationels
Bien que les nombres rationnels représentent une immense quantité de nombres, il existe des nombres qui existent dans la vraie vie, mais qui ne sont pas des nombres rationnels. Prenons un exemple assez simple : la racine carrée de 2. Cet exemple est le plus connu, car il est le responsable d'un cataclysme historique : la découverte de nombres qui ne sont pas rationnels. Au Vième siècle avant J-C, les grecs le démontrèrent de manière solide (bien qu'il est difficile de dire qui et quand précisément ce résultat a été obtenu). En réalité, beaucoup de civilisations, comme les babyloniens ou les indiens, ont tenté de l'exprimer sous forme de fraction, sans succès. Cependant, la démonstration n'est pas si dure, et est une démonstration par l'absurde. En effet, "définissons" un nombre "a" représentant la représentation en nombre rationnel de racine carrée de 2.
Dans ce cas, il existe une représentation de ce nombre tel que "b" et "c" sont premiers entre eux. Par définition pure, "a" au carré est égal à 2, et donc "b" est égal à "c * 2".
Dans ce cas, "b" au carré est pair (car il représente 2 multiplié par quelque chose). Donc, "b" est aussi pair, et est donc un multiple de "2" par un nombre "r". Donc :
Donc, "c" au carré est pair. Donc, "c" est aussi pair, tout comme "b". Or, si "b" et "c" sont tous les 2 pairs, alors la fraction peut se simplifier, en divisant par 2 en haut en bas. Or, on a supposer que notre fraction "a" est simplifiée au maximum : c'est faux. Dans ce cas, quelque soit "b" et "c", la fraction sera simplifiable par "2" : ce n'est pas possible, car nous ne pouvons pas diviser par "2" une infinité de fois dans "N". Donc, cette fraction ne peut pas être représenté par un élément de "Z" et un élément de "N" : "a" n'est pas une fraction, et racine carrée de 2 est irrationel.
Ce résultat peut nous faire poser une question : qu'est ce qu'est racine carré de 2 ? Il nous faut un ensemble plus grand, permettant de le définir.
Qu'est ce qu'est un nombre réel ?
Intuitivement, l'ensemble des nombres réels est assez simple à définir. L'ensemble des nombres réels représente l'ensemble contenant TOUS les nombres possibles sur la droite des nombres (et donc, tous les nombres comparables possibles tout court). Comme racine carré de 2 appartient bel et bien à cette droite (quelque part en 1 et 2), il est un nombre réel. Par définition de la droite des nombres, on peut s'approcher de la valeur de n'importe quel nombre réel aussi proche que l'on veut(et ça, même si on ne l'atteindra jamais précisément, et même si on peut l'atteindre du premier coup, comme avec un nombre entier naturel). Cette façon de voir les nombres réels permettent de comprendre une propriété possible d'un ensemble (et, plus précisément, d'un espace métrique) : la complétude. Un espace métrique est dit complet si, pour toutes les valeurs possibles dans l'ensemble de l'espace, il est possible de s'approcher aussi près que l'on veut de cet ensemble (en réduisant petiit à petit la distance entre une valeur plus simple et la valeur que l'on veut approcher). Ici, l'ensemble des nombres réels est un espace métrique, où nous pourrons y définir une distance.
D'un point de vue logique, ces nombres là sont peut être les plus durs à définir. Historiquement, énormément de tentatives ont été faites, pour définir les nombres réels, mais aussi l'ensemble des nombres réels. Déjà, il a été choisis d'appeler l'ensemble des nombres réels "R". Au début du XXème siècle, le mathématicien Hilberten propose des définitions intéressantes. Selon lui, l'ensemble des nombres réels est le plus grand espace métrique totalement ordonné formant une structure algébrique de "corps", et où les éléments sont archimédien et où l'ensemble est complet. Nous avons déjà présenté le concept d'espace métrique et d'ensemble totalement ordonné plus tôt. Nous avons déjà présenté la complétude plus haut. La propriété "archimédien" est une propriété très simple. En effet, une structure algébrique est dite "archimédienne" si, pour tout nombre "a" et "b", il existe un multiple de "c" tel que "a * c" est plus grand que "b". Dans le cas des magmas / monoïdes / groupes, un magma (et donc, un monoïde ou un groupe) est dit "archimédien" si, pour toute valeur "a" et "b", il existe un nombre entier naturel de "c" tel que "c" répétition de la loi sur "a" est plus grand que "b". En fait, cette propriété est vérifiée dans plein de structures que nous avons déjà vue : "(N, +)", "(Q, +)"... Il ne manque que le corps à définir, ce que nous ferons plus tard. Pour l'instant, dite vous juste qu'il s'agit d'une structure algébrique à deux lois de composition : l'addition et la multiplication. Cette première définition des nombres réels est assez intéressante pour pas mal de résultats.
Bien que cette définition est assez intuitive, elle manque de rigueur axiomatique. En effet, on n'a pas défini ce qu'est vraiment un "nombre réel", autre que "un nombre quelconque qui existe". Maintenant, définissons les de manière concrète, avec une technique assez simple : les coupures de Dedekind.
L'arithmétique des nombres réels
L'arithmétique basique de "R" est la même que celle dans "Q", bien que les démonstrations soient plus compliquées. Pour correctemennt les définir, nous allons utiliser les coupures de Dedekind.
Déjà, "R" possède bel et bien une opération d'addition, avec les mêmes propriétés que dans "Q" et "Z". Comme pour "N", "Z" et "Q", opérer deux nombres rationnel / entier naturel / relatif écrit dans "R" revient à opérer deux nombres rationnel / entier naturel / relatif relatifs tout cours. Dans "R", l'opération est définie comme cela :
Cette démonstration est vraiment peu élégante : nous ne l'utiliserons que pour les démonstrations obligatoires. Cependant, comme elle utilise directement la démonstration de l'addition dans "Q", ces démonstrations seront assez simples à déduire. L'addition de tout nombre réel donne un autre nombre réel (ce qui est assez trivial, puisque "E" et "F" sont des parties de "Q", et qu'ils sont complémentaires par définition). En fait, l'addition dans "R" permet de former un groupe abélien. Donc, elle est associative, admet un neutre, chaque élément a un inverse et elle est commutative (démontré ici). Comme pour dans "Q", soustraire "b" à "a" revient à additionner "-b" à "a".
De plus, "R" possède bel et bien une opération de multiplication, avec les mêmes propriétés que dans "Q". Comme pour "N", "Z" et "Q", opérer deux nombres rationnel / entier naturel / relatif écrit dans "R" revient à opérer deux nombres rationnel / entier naturel / relatif relatifs tout cours. Dans "R", l'opération est définie comme cela :
Comme pour l'addition, cette démonstration est vraiment peu élégante : nous ne l'utiliserons que pour les démonstrations obligatoires. Cependant, comme elle utilise directement la démonstration de la multiplication dans "Q", ces démonstrations seront assez simples à déduire. La multiplication de tout nombre réel donne un autre nombre réel (ce qui est assez trivial, puisque "E" et "F" sont des parties de "Q", et qu'ils sont complémentaires par définition). En fait, la multiplication dans "R" permet de former un monoïde. En effet, on a toujours un problème : 0 n'a pas d'inverse par cette opération. Or, comme dans "Q", la multiplication dans "R*" permet de former un groupe abélien. Donc, elle est associative, admet un neutre, chaque élément a un inverse et elle est commutative (démontré ici). Comme pour dans "Q", diviser "b" (non nul) à "a" revient à multiplier l'inverse de "b" à "a".
Les intervalles de nombres
Un objet très pratique utilisable avec les nombres réels est l'intervalle. Une intervalle est un ensemble de nombre réel représentant tous les nombres réels situés entre deux autres nombres réels. Pour ça, nous allons utiliser les relations d'ordres dans R. En effet, un nombre "c" est entre deux nombres "a" et "b" (avec "a inférieur à b") si "c" est supérieur à "a" et inférieur à "c". Cependant, il existe plusieurs types d'intervalles, selon si la relation d'odre utilisée est "strictement inférieure", "inférieure ou égale", "strictement supérieure" ou "supérieure ou égale". Si l'intervalle est constitué de deux "supérieure / inférieure ou égale", on dit que l'intervalle est fermé, et on l'a marque / défini comme ça (avec des crochets, généralement nommées des bornes) :
Ce genre d'intervalle est aussi appelé "segment". Cependant, si l'on utiliser des "strictement supérieure / inférieure", on dit que l'intervalle est ouverte, et on le note de manière similaire (on inverse juste les crochets) :
On peut aussi mélanger les deux, comme dans l'exemple ci-dessous. Dans le premier cas, on dit que la première borne est ouverte et la deuxième est fermée. Dans le deuxième cas, on dit que la première borne est fermée et la deuxième est ouverte.
Comme il s'agit d'ensembles, on peut les utiliser avec tout le vocabulaire ensembliste basique. Par exemple, on peut utiliser le concept de minimum et maximum, comme défini au chapitre 1. Si la première borne est fermée, le minimum de l'intervalle est "a", sinon l'intervalle n'a pas de minimum. De plus, si la deuxième borne est fermée, le maximum de l'intervalle est "b", sinon l'intervalle n'a pas de maximum. Aussi, tous les éléments de "[a, b]" sont dans "]a, b[", sauf "a" et "b". Donc, "]a, b[" est inclu dans "[a, b]" (mais l'inverse est faux).
Ce concept crée quelque propriétés bizarres. Par exemple, l'union de "]a, b]" et "[b, c[" donne "]a, c[" (et c'est la même chose pour des crochets fermés pour "a" et "c"). Cependant, l'union de "]a, b[" et "]b, c[" donne "]a, c[ sans b", car "b" n'est dans aucun des deux ensembles (ce qui fait que l'union n'est pas un intervalle, car un éléments entre "a" et "c" est hors de l'ensemble)Par contre, "]a, b[ U [b, c[ = ]a, c[" et "]a, b] U ]b, c[ = ]a, c[". Ces propriétés sont très facilement démontrables pour quiconque ayant compris le formalisme des intervalles. D'ailleurs, l'ensemble vide et les singletons de nombres sont considérés comme des intervalles de "R". Dans la même idée, l'intersection d'intervalles est toujours un nouvel intervalle. Cependant, un intervalle qui n'est pas l'ensemble vide ou un seul nombre est dit "non-triviale".
Avec ce concept, on peut introduire quelques nouveaux concepts centraux en analyse réelle : majorants, minorants ou les bornes. Un majorant d'une partie "F" d'un ensemble "E" est un élément de "E" supérieur à tous les éléments de "F". Au contraire, un minorant d'une partie "F" d'un ensemble "E" est un élément de "E" inférieur à tous les éléments de "F". Ces deux concepts ne sont pas uniques : une partie peut avoir une infinité de majorants et une infinité de minorants. Cependant, il peut exister un majorant / minorant appartenant à "F", grâce à la relation "supérieur ou égal" et "inférieur ou égal". Néanmoins, certaines parties (comme des parties invoquant un infini) peuvent ne pas en posséder. Par exemple, pour l'intervalle "[3, 5]", "6", "875", "6782345678235" ou même "5" sont des majorants, et "2.9", "-1" ou "-782364789" sont des minorants. Un majorant "p" et un minorant "q" se définissent comme ça :
Avec ces concepts, on peut en définir deux nouveaux : les bornes supérieures et inférieures. La borne supérieure d'une partie "F" d'un ensemble "E" est le plus petit majorant de "F" (et donc le plus petit élément supérieur à tous les éléments de "F"). Au contraire, la borne inférieure d'une partie "F" d'un ensemble "E" est le plus grand minorant de "F" (et donc le plus grand élément inférieur à tous les éléments de "F"). À l'inverse des majorants et minorants, ces bornes sont uniques. Par exemple, pour l'intervalle "[3, 4[", "4" est un majorant de l'intervalle, et aussi la borne supérieure de l'intervalle (et "3" est un minorant, et la borne inférieure de l'intervalle). Une borne supérieure "d" et une borne inférieure "e" se définissent comme ça :
Il existe d'ailleurs un moyen de "décomposer" un intervalle, avec les subdivisions d'intervalles. Une subdivision d'un segment réel est une suite d'éléments de l'intervalle tel que le premier élément est le minimum du segment, le dernier élément est le maximum du segment, et chaque élément de la suite est strictement inférieur à l'élément suivant de la suite. Par exemple, dans le segment "[0, 4]", une subdivision peut être "(0, 1, 2, 2.5, 2.3, 3, 3.5, 4)".
Les applications utilisant des réels
Les suites réelles
Nous avons déjà rencontré les suites mathématiques lors du premier chapitre. En analyse réelle, l'ensemble d'arrivée d'une suite est très souvent l'ensemble des réels. Il est très commun de les expliciter, comme dans cet exemple :
Une des opérations possibles d'une suite est la somme partielle. La somme partielle au rang "n" d'une suite mathématique "u" est la somme des "n" premiers éléments de la suite. Par exemple, la somme partielle de rang "0" de notre suite "1 / (n + 1)" est 1, celle de rang "1" est 1.5, celle de rang "2" est 1.8[3]... On la note généralement "S(n)", ou l'on peut aussi les noter avec notre symbôle de somme sigma.
Les fonctions réelles
Bien que les suites sont importantes, l'intérêt de l'analyse n'est généralement pas l'étude de suite, mais celle de fonctions, souvent réelles. Une fonction réelle est une fonction allant de l'ensemble "R" vers l'ensemble "R". Comme pour les suites, est très commun de les expliciter, comme dans cet exemple :
Selon la façon dont on formule les fonctions, elles ont des noms différents. Déjà, une fonction réelle de la forme "a * x" avec "a" un nombre réel est nommée une fonction linéaire. D'un point de vue graphique, il s'agit d'une droite non-verticale qui passe par le point "(0, 0)".
De plus, une fonction réelle de la forme "a * x + b" avec "a" et "b" des nombres réels est nommée une fonction affine. D'un point de vue graphique, il s'agit d'une droite non-verticale quelconque.
Il existe un type de fonction réel assez spécial : les fonctions en escalier. D'un point de vue rigoureux, une fonction réelle en escalier est une fonction réelle tel qu'il existe une suite finie d'intervalles ouverts disjoints où la fonction est constante, telle que toutes valeurs de son ensemble de définition (or des valeurs représentant les extrémités des intervalles) appartiennent à une de ces intervalles. Ici, cette suite d'intervalles peut être décrite avec une subdivision de l'ensemble de définition de la fonction, où chaque valeur de la subdivision représente les extrémités des intervalles (on dit que la subdivision est adaptée à la fonction). Cette définition autorise à ce que certains antécédents (ceux qui sont aux extrémités des intervalles ouverts) admettent des images qui n'ont rien à voir avec les autres valeurs de la fonction. Voici un exemple très simple : une fonction en escalier valant 1 si la valeur de la partie entière est paire, et 0 sinon. Ici, sur le segment "[-3, 3]", les intervalles ouvertes où la fonction est constante sont "]-3, -2[", "]-2, -1[", "]-1, 0[", "]0, 1[", "]1, 2[" et "]2, 3[" (la subdivision adaptée serait dans ce cas "(-3, -2, -1, 0, 1, 2, 3)").
La géométrie
La géométrie classique
Qu'est ce qu'est la géométrie ?
Peut être que certains attendaient cette branche des mathématiques, et nous allons enfin en parler : la géométrie. La géométrie est historiquement la discipline mathématique qui étudie les possibilités sur des plans 2D (sur papier) et 3D (dans l'espace / la vraie vie). Il s'agit de l'une des plus vieilles branches mathématiques, car il s'agit de la plus simple à représenter dans la vraie vie. C'est pour cela qu'il est très difficile de dater les premières utilisations de la géométrie par l'homme. Cependant, pour leurs travaux, toutes les civilisations anciennes utilisaient des formes plus ou moins avancées de géométrie. Un exemple extrêmement connu : la pyramide de Kheops, construite à Gizeh, en Égypte, en -2500 avant J.C. Cette pyramide fait 140 mètres de haut, et est restée la plus grande construction humaine pendant environ 3800 ans (avant d'être dépassée par la cathédrale anglicane de Lincoln en 1311). Pour construire une pyramide comme ça, les architectes ont utilisés beaucoup de géométrie (très primitive, mais de la géométrie quand même).
Les premiers à avoir fait une formalisation de la géométrie assez stable pour être toujours utilisée aujourd'hui sont les grecs. L'exemple le plus connu est un mec intelligent, avec son fameux théorème. Cependant, il n'est pas celui qui a posé les premiers "axiomes" de géométrie : celui qui a fait ça est un mec intelligent. En effet, Euclide a énuméré 5 axiomes de géométrie, formant ce que l'on appelle la géométrie euclidienne, qui sont tellement efficaces qu'ils ont perduré dans l'histoire jusqu'au XIXème siècle. Ces axiomes (et certains résultats déduits de ces axiomes) sont présentés dans son traité "Les Éléments", un des documents les plus imprimés de l'histoire.
Cette géométrie euclidienne se base sur un principe simple : seule la réalisation (dans la vraie vie) et la construction des résultats est importante. En d'autres termes : si vous pouvez tracer quelque chose, alors cette chose existe. D'ailleurs, certains concepts étaient considérés comme "trop triviaux" / "trop simple / direct à obtenir" pour nécessiter une définition / démonstration précise. C'est le cas du concept de longueur, ou du concept d'angle. Pour faire cela, les géomètres disposés d'outils très précis, qui représentés explicitement la façon dont ils s'autorisaient d'utiliser de la géométrie. Déjà, l'outil permettant de mesurer (et de tracer) des longueurs est la règle graduée. De plus, l'outil permettant de mesurer des angle est le rapporteur. En suite, l'outil permettant de tracer un cercle est le compas. En mélangeant ce que nous pouvons faire avec ces outils, nous obtenons des concepts de plus en plus complexes. Ces outils représentent le coeur des mathématiques de l'époque.
Dés le XVIIème siècle, les découvertes en analyse / algèbre mathématiques ont donné un nouveau moyen d'approche des mathématiques aux mathématiciens. La géométrie n'échappe pas à cette règle, et va elle aussi évoluer pour, et faire émerger une nouvelle branche de la géométrie : la géométrie analytique. La géométrie analytique est une façon précise d'étudier la géométrie, en utilisant le concept de coordonnées couplé avec le concept d'équation. Dans l'histoire, son principal contributeur est un mec intelligent, au début du XVIIème siècle, avec un traité nommé "La Géométrie". Bien évidemment, ce concept peut parfaitement se coupler avec la géométrie classique, mais est bien plus rigoureux et formalisé. Historiquement parlant, cette géométrie (telle que formulée par ces concepteurs) n'était faite que pour résoudre des équations simples (généralement n'utilisant que les 4 opérations élémentaires : "+", "-", "*" et "/"). Or, quand des choses plus complexes ont été découvertes, les mathématiciens ont eu besoin d'outils plus complexes, que l'on retrouve sous un nouveau nom : la géométrie algébrique. La géométrie algébrique est une extension de la géométrie analytique, où les équations étudiées peuvent être aussi complexes que l'on veut. C'est vers le XIXème siècle que cette branche de la géométrie apparaît, avec beaucoup de grands noms, comme Hilbert.
Aussi rigoureuse qu'était cette géométrie, elle ne l'était pas assez pour le XIXème siècle, et l'arrivée de la logique avancée en mathématique. En effet, dés ce siècle, les mathématiciens ont mis leurs efforts à une formalisation rigoureuse de toutes les mathématiques, géométrie incluse.
Les bases de la géométrie classique
Avant de s'attaquer à la sombre partie de la géométrie, re-voyons les bases de la géométrie classique.
Commençons à définir certains concepts simples de géométrie classique. Déjà, une longueur entre deux points est une représentation sous forme de nombre de la distance entre ces deux points. Comme nous l'avons dit, une longueur se mesure avec une règle graduée. Généralement, les graduations successives sont séparées d'une exacte même distance.
En suite, un angle entre 3 points est une mesure de la différence d'orientation entre les deux droites formées par ces deux points (en sachant que nous travaillons sur les droites passant toutes les deux par un seul des points de départ).

Pour mesurer un angle, on utilise un formalisme inspiré du cercle. En effet, il est possible de mesurer un angle en vérifiant la proportion du cercle de centre le point où les deux droites se croisent représenté dans l'angle. D'ailleurs, cette mesure ne dépend pas du rayon du cercle : dans tous les cercles de centre le point où les deux droites se touchent auront la même proportion représentée via un même angle.
Cependant, une question se pose ici : comment numériser la mesure d'un angle ? Comme nous avons vue, la mesure d'un angle représente généralement la proportion couverte par l'angle du cercle de centre le point où les deux droites se croisent représenté dans l'angle On pourrait donc théoriquement le modéliser sous forme de pourcentage du cercle couvert. Cependant, pour obtenir des valeurs plus facile à étudier, nous allons complexifier un peu cette représentation. La façon la plus utilisée en France est le degré. Le degré représente une unité pour la mesure d'un angle, où l'angle couvrant "0 %" du cercle représente "0" degré et celui couvrant tout le cercle représente "360" degrés. Un degré représente donc "1/360" de cercle. Généralement, un degré se note avec le symbôle "°" juste après le nombre : "1°", "45°", "236.1258°"...
Cependant, il existe une autre façon de faire, utilisant le cercle : le radians. Le radians représente une unité pour la mesure d'un angle, qui vaut le coefficient à multiplier au rayon pour obtenir la longueur de la frontière du cercle que l'angle permet de représenter. Pour cela, nous allons obtenir la proportion du cercle couverte par l'angle, que nous multiplions par le périmètre du cercle : pi * 2. Nous pouvons donc faire assez aisément des conversions "degré - radian" et "radian - degré".
La géométrie analytique
Le lien nombres réels - géométrie analytique
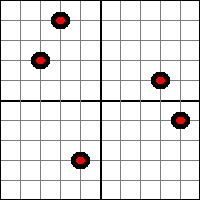
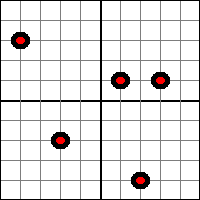
Déjà, nous pouvons définir le produit cartésien de "R" et lui même, noté "R²", qui représente tous les couples de réels possibles. Ici, une question se pose : comment ce concept pourra nous être utile en géométrie ? En fait, comme il est possible de créer une droite des nombres réels, il est possible de créer un plan avec des couples de réels. Pour ça, l'intuition est assez simple : on commencer par tracer une droite horizontale, puis une droite verticale (qui se coupent donc en 1 point). En suite, on va chercher à placer une "croix" sur une partie de ces droites, si possible pas trop loin de la coupure des deux droites (et aussi de telle manière que la croix de la droite horizontale soit à la même distance de la coupure des deux droites que la croix de la droite verticale). Finalement, on va considérer que, pour chaque point que l'on peut tracer dans notre plan, on peut obtenir le point le plus proche de la droite horizontale et de la droite verticale, qui se situe à une distance de la coupure des deux droites représentant un certain nombre de fois la taille entre la croix que nous venons de poser et la coupure des deux droites. En fait, le calcul de ces deux distances représente le calcul de deux nombres réels, et donc un couple de nombres réels, et donc un élément de "R²". À l'inverse, tout couple "(x, y)" de nombre réel peut être placé sur notre plan, en se situant sur la droite horizontale à "x" fois la distance entre notre croix horizontale et la coupure des droites de cette coupure des droites, puis en montant (ou descendant, si "y" est négatif) de "y" fois la distance entre notre croix verticale et la coupure des droites de cette coupure des droites. C'est comme ça que fonctionne la géométrie analytique basique.
Posons un peu de vocabulaire pour rendre tout ça plus précis. Déjà, la droite horizontale est généralement notée la droite des abscisses, et la droite horizontale est généralement notée la droite des ordonnées. En fait, dans un couple de réel de la sorte "(x, y)", "x" est appelé l'abscisse et "y" est appelé l'ordonné. Il y a encore beaucoup d'autre vocabulaire, mais nous le découvriront un peu plus tard, quand ça sera le bon moment.
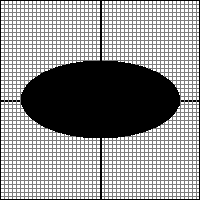
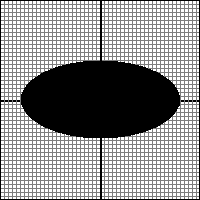
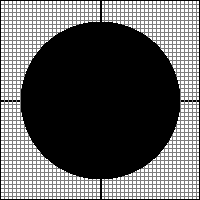
Comme nous pouvons noter chaque point sous la forme "(x, y)", on peut utiliser "x" et "y" dans des relations précises. En fait, on peut définir des ensembles de points par l'ensemble des couples solutions d'une équation précise quelconque, impliquant "x", "y" ou les deux. Par exemple, on peut facilement définir l'ensemble des points constituant un cercle, avec une simple équation :
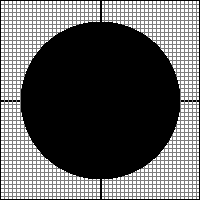
Intuitivement parlant, un cercle est un ensemble de point, tel que tous les points de l'ensemble se trouvent à une distance similaire (appelée "rayon" du cercle) d'un même point, dit "centre" du cercle. Cette équation nous permet donc de lier les cercles obtenus via des traçages possibles en géométrie classique avec de la géométrie analytique. Ici, "a" défini l'abscisse du centre du cercle, "b" représente l'ordonnée du centre du cercle, et "r" représente le rayon du cercle. Nous étudierons plus précisément cette équation plus tard. Dans le cas d'un cercle de centre "(1, 1)" et de rayon "1", on peut graphiquement afficher :

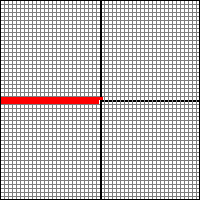
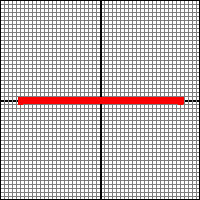
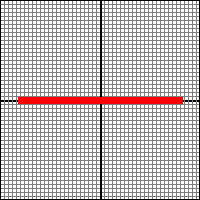
De la même manière, nous pouvons définir des traits parfaitement droits, nommés des droites, avec des équations de cette forme. En effet, une droite quelconque se définie avec une équation de la forme "a * x = b * y + c", avec "a", "b" et "c" définis comme des nombres réels quelconques. Nous aurons l'occasion d'étudier pourquoi et comment se comporte cette équation. Voici un exemple : l'équation "x = 3 * y - 6" en rouge, l'équation "y = 2" en bleu, et l'équation "x = -1" en vert.
Généralement, une autre définition des droites est donnée. En effet, à l'école primaire, une droite représente un ensemble de point parfaitement alignés avec deux autres points distints du plan. Le problème de cette définition est que sa compréhension approfondie demande un peu d'algèbre précis, que nous n'avons pas encore traité. Cependant, d'un point de vue purement géométrique, ce concept est utilisé depuis plusieurs millénaires, introduit par un mec intelligentdans son fameux livre "Les Éléments", et considéré comme un concept tellement trivial qu'il n'était pas plus défini que ça. En rélité, une droite est très souvent définie de cette manière en géométrie, mais moins en algèbre, où l'on préferera l'équation.
En resteignant l'ensemble à un certain sous-ensemble de cette droite, on peut donc la découper. Par exemple, on peut restreindre notre droite "y = 2" pour tous les "x" présents entre "-3" et "3", ce qui donne ce segment.
Le plus utile est de découper la droite en un ensemble de points de la droite où il n'y a aucune séparation possible entre les points. Généralement, une partie représentant l'ensemble des points entre deux points distints sur une droite est nommée un segment de droite. En plus, nous pouvons utiliser plusieurs segments du genre pour faire des choses plus ou moins complexes.
Ici, nous relions le concept de tracer des segments en géométrie classique avec ce genre d'équation en géométrie analytique. Avec ça, nous pouvons définir un autre concept primordial en géométrie : les polygônes. Un polygone est une figure géométrique formé par un nombre fini de segments reliés entre eux. Généralement, les segments formant le polygone sont nommés les côtés du polygône. C'est ce concept qui permet de définir des termes biens connus : triangles (3 côtés), rectangle (4 côtés)...
La trigonométrie
Comme nous le verrons plus tard, le polygône le plus simple à définir (et utiliser) est le triangle. De plus, il permet de donner naissance à une branche très spécifique de la géométrie : la trigonométrie. La trigonométrie est la discipline mathématique qui traite des mesures dans un triangle ("trigono" vient de "triangle", et "métrie" vient de "mesure"). Pour étudier précisément le triangle, nous allons devoir faire fi de la rigueur, et faire comme les grecs anciens : avec le traçage pure.
Commençons par introduire le type de triangle le plus pratique (et de très loin) : le triangle rectangle. Un triangle est dit rectangle si il contient un angle droit quelconque. Intuitivement, un triangle est dit rectangle si il contient un angle droit quelconque. De manière très concrète, un angle droit est l'angle formé entre un sol parfaitement droit et un piquet orienté parfaitement vers le haut. Avec le formalisme des degrés, un angle droit mesure "90°".
Voyons comment les anciens géomètres tracés ce genre de triangle, à partir de deux points du triangle (qui doivent être l'un des segments de l'angle), à la règle et au compas. La seule difficulté ici est de tracer proprement l'angle droit : traçons en un à partir de deux points de départs "A" et "B". Pour cela, nous aurons besoin d'un troisième point "D" aligné par rapport à "A" et "B", et placé deux fois plus loin de "A" que "B". Traçons le segment entre "A" et "D".
En suite, nous aurons besoin du compas. En fait, nous allons tracer deux cercles de tailles quelconques (mais la même pour les deux), de centre "A", puis "D" (il faut obligatoirement que ces cercles se touchent en deux points).
En suite, traçons la droite formée par les deux points où les cercles se touchent. En fait, cette droite est perpendiculaire à la droite de départ, et tout point sur cette droite forme un angle droit avec "A" et le point de rencontre entre cette droite et la droit de départ (qui est le point exactement entre "A" et "D" : "B").
Vous avez juste à connecter un quelconque point "C" de la nouvelle droite avec "A" : vous avez un triangle rectangle en "B". Ce nouveau segment porte d'ailleurs un nom très spécifique : l'hypothénuse. Intuitivement, l’hypoténuse d'un triangle rectangle est le côté opposé à l'angle droit du rectangle. Ce concept est d'ailleurs à la base d'un des théorèmes les plus connues des mathématiques : le théorème de Pythagore. . Il admet aussi une réciproque très connue : . Dans un triangle "ABC" rectangle en "B", il stipule l'identité suivante :
Il est possible de connaître et de relier la valeur des angles dans un triangle rectangle avec une technique complexe, mais qui nous sera utile partout en mathématiques. Déjà, pour des ratios donnés entre les différents côtés d'un triangle rectangle, les valeur des angles dans le triangle restent invariants de la taille du triangle. Donc, les ratios des angles seront eux aussi invariants de la taille du triangle. On peut donc donner des formules générales pour chaque triangle rectangle, permettant de passer des ratios des angles aux ratios des côtés. En effet, il existe une fonction prenant en paramètre le ratio entre un côté et l'hypoténuse et retournant la valeur de l'angle entre ces deux côtés (en radians) : c'est la fonction cosinus. De manière réciproque, il existe une fonction prenant en paramètre le ratio entre un côté et l'hypoténuse et retournant la valeur de l'angle opposé au côté qui n'est pas l'hypoténuse (en radians) : c'est la fonction sinus.
Quand on voit ce genre de fonction, on pourrait avoir envie de les expliciter pour calculer des précises de cette fonction. Cependant, c'est un exercice très complexe, que nous verrons plus tard. Or, il est possible de tracer des triangles rectangles, et de mesurer les valeurs précises à la main.
Ces fonctions trigonométriques permettent de formuler des identités précises très importantes en trigonométrie. Par exemple, il existe une formule pour exprimer la valeur de "cos(x + a)" avec seulement des "cos(x)", "cos(a)", "sin(x)" et "sin(a)". Bien que cette formule possède une démonstration très rigoureuse, pour cette partie du cours, nous allons nous contenter d'une démonstration géométrique. Prenons un triangle rectangle comprenant un angle de taille "a".
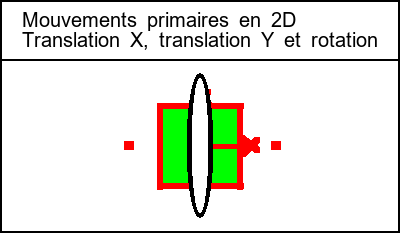
Effectuons une rotation centrale de point le point tangent à l'angle "a" du triangle d'un angle "b". Nous obtenons le triangle retourné, ainsi qu'un nouvel angle de mesure "a + b".
Sur cette figure, pour rappel, nous cherchons la taille du segment rouge. Pour obtenir la taille du segment rouge, il faudrait donc prendre la taille du segment vert, et lui enlever celle du segment violet. Déjà, nous pouvons très facilement obtenir la longueur du segment vert. En effet, le segment bas du triangle que nous avons tourné peut ici être vue comme l'hypothénuse d'un nouveau triangle, tel que le segment vert représente le côté tangent à l'angle "b". Donc, sa longueur représente la taille de l'hypothénuse de ce rectangle ("cos(a)") multiplié par "cos(b)" : "cos(a) * cos(b)". En suite, on peut voir que le segment violet peut permettre de tracer un nouveau triangle rectangle, où l'hypothénuse représenterait le côté à droite de notre triangle rectangle tourné, de taille "sin(a)". De plus, comme le segment violet et le segment bleu horizontal sont parallèle par construction, on peut en déduire que l'angle entre le segment violet et le côté bas du triangle que nous avons tourné est de "b". Comme l'angle entre le côté bas et le côté droit du triangle que nous avons tourné est droit, alors l'angle entre le côté violet et la partie droite du triangle que nous avons tourné (hypothénuse du triangle rectangle contenant le segment violet) et d'un angle droit moins "b" : l'autre angle (non droit) de ce triangle rectangle est donc "b". Donc, comme cet angle "b" est l'angle opposé du segment violet, sa longueur est donc celle de l'hypothénuse "sin(a)" multiplié par "sin(b)" : "sin(a) * sin(b)". Finalement, on peut en déduire la formule de "cos(a + b)" : "cos(a + b) = cos(a) * cos(b) - sin(a) * sin(b)".
On peut de la même manière trouver la formule pour "sin(x + a)". Pour mieux comprendre, refaisons notre schéma, en changeant les couleurs de certains segments.
Encore une fois, nous cherchons la taille du segment rouge. Ici, la taille du segment rouge est égal à la taille du segment vert et du segment violet. Le segment vert se calculera de manière assez similaire que pour l'autre calcul. En effet, la taille du segment vert est égal à la taille de l'hypothénuse du triangle rectangle auquel il appartient ("cos(a)") multiplié par le sinus de l'angle opposé (ici "b") : "cos(a) * sin(b)". Maintenant, calculons la taille du segment violet. Ici, la taille du segment violet est égal à la taille de l'hypothénuse du triangle rectangle auquel il appartient ("sin(a)") multiplié par le cosinus de l'angle adjacent (ici "b") : "sin(a) * cos(b)". Finalement, on peut en déduire la formule de "sin(a + b)" : "sin(a + b) = sin(a) * cos(b) + cos(a) * sin(b)".
Avec ça, on peut facilement en déduire les formules de différences. En effet, ces formules fonctionnent pour tout "a" et tout "b" : posons "c = -b".
Pour rappel, "cosinus" est paire et "sinus" est impaire : "cos(-b) = cos(b)" et "sin(-b)" = "-sin(b)".
On peut faire l'exact même calcul pour "sin(a - b)" :
Les graphes de fonctions
Nous avons déjà parlé des graphes de fonctions dans le chapitre 1, dans la partie application. Cependant, en analyse, cet outil est bien plus poussé que pour de simples applications / fonctions, en les utilisant avec nos outils d'analyse (suites et fonctions réelles). Pour rappel, un graphe de fonction représente l'ensemble des couples formés par (dans l'ordre) chaque élément de l'ensemble du domaine de définition de la fonction et de son image par cette fonction. Or, comme nous connaissons les ensembles de départ ("N" ou "R"), nous pouvons représenter notre graphe de manière plus intuitive. En effet, "R²" (et, par extension, "N²") est définissable comme un plan, et nous pouvons considérer un ensemble représentant l'ensemble des couples possibles des antécédents de la fonction associés à leur image par la fonction, représentant un ensemble de points du plan. Pour être précis, nous allons représenter un ensemble de points du plan comme des couples de réels "(x, f(x))", où "x" est un antécédent de la fonction, et "f(x)" est l'image de "x" par la fonction. Au final, vous obtenez un graphique en 2D, représentant comment votre fonction se comporte en chaque valeur via la droite de départ. Voici un exemple simple, de la fonction réelle transformant un réel "x" en la valeur "2 * x + 0,5".
Selon les types précis de fonction, leur graphe possède des propriétés précises. Déjà, une fonction linéaire représente une droite non-vertical qui passe par le point "(0, 0)".
De plus, une fonction affine représente une droite non-verticale quelconque..
Quelque soit la fonction, il est très facile d'obtenir l'équation de l'ensemble de point formé par une fonction. En effet, puisque qu'un point d'un graphe de fonction se note "(x, f(x))", on peut changer le nom de "f(x)" en "y", et écrire "y = f(x)", en remplaçant "f(x)" par le développement de la fonction si nécessaire. Cela nous permet donc d'obtenir les équations des formes générées par une fonction linéaire / affine.
Par observation (que nous aurons l'occasion de démontrer plus tard), on peut remarquer que toutes droites non-verticales dans le plan peuvent s'obtenir par des fonctions linéaires et affines. En plus, nous pouvons même trouver un moyen de trouver des équations permettant d'obtenir l'ensemble des droites verticales du plan. En effet, une droite verticale du plan (ne passant donc que par une unique abscisse "a") s'écrit avec l'équation "x = a". Effectivement, le "y" n'a aucune importance sur le déroulé de la droite : les points ne peuvent donc pas être "exclu" à cause d'un "y" spécifique, ce qui fait que tous les "y" possibles d'abscisse "x" forment la droite (ce qui donne intuitivement une droite verticale).
Les représentations paramétriques
Comme les ensembles de points sont des ensembles, on peut donc les définir comme des ensembles. L'une des façons possibles de faire est donc de paramétrer ces ensembles. En fait, l'idée est de définir des fonctions admettant comme image un ensemble de point précis. Un exemple très simple s'obtient avec toutes les fonctions de "R" vers "R" admettant un graphe (comme nous l'avons vu plus haut). En effet, on peut en obtenir une application allant de "R" vers "R²", transformant "x" en "(x, f(x))". Dans ce cas, l'ensemble image de cette application représente exactement la forme obtenue sur le graphe.

Il s'agit donc d'une façon différente de définir un ensemble de points, qui peut s'avérer très utile dans plein de cas.
Dans notre exemple, nous transformons "x" en "(x, f(x))", mais nous pouvons aussi théoriquement définir une nouvelle fonction "g", et définir une application allant de "x" vers "(g(x), f(x))". En effet, rien ne vous empêche nous plus de mettre des valeurs constantes, comme une application qui transforme "x" en "(3, f(x))". En fait, le plus difficile est de transformer un ensemble de points défini autrement en ensemble défini par paramètre, et vice-versa.
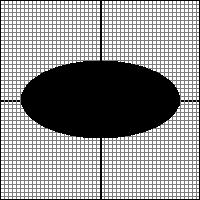
Une des figures les plus utiles (mais pas des plus simples) à paramétrer est le cercle. En effet, il existe un moyen précis et facile d'obtenir un demi cercle. Pour cela, nous allons avoir besoin d'un graphe de fonction. En effet, la fonction réelle transformant "x" en "racine carré de (-x * x + 1)" permet de faire un demi cercle de rayon "1" et de centre "(0, 0)".
Grâce aux propriétés de la racine carré, on peut facilement calculer l'ensemble de définition de la fonction : "la fonction est définie équivaut" à dire que "x inférieur ou égal à 1". Cependant, on peut remarquer quelque chose : un cercle demande que certains "x" admettent plusieurs images. Donc, il sera impossible de n'utiliser qu'un simple graphe de fonction réel. Cependant, on peut définir une fonction "g" pour le "x", valant "x" pour "x" se situant entre "-1 et 1 inclu", et "x - 2" pour "x" se situant entre "1 exclu et 3 inclu", et une fonction "f" valant "racine carré de (-x * x + 1)" pour x se situant entre "-1 inclu" et "1 inclu", et "-racine carré de (-x * x + 1)" pour x se situant entre "1 exclu" et "3 inclu". Ici, on revient donc à l'endroit où l'on trace le cercle pour la deuxième partie de la fonction, et tracer le cercle dans la partie négative.
Nous pouvons donc obtenir l'équation paramétrée par un réel "x" d'un cercle de rayon "1" et de centre "(0, 0)" : "(g(x), f(x))".
Bien que cette formule utilise simplement de l'arithmétique basique, elle n'est pas la seule équation possible. Nous allons donc obtenir une autre façon de faire, grâce aux triangles, et aussi à une branche très spécifique de la géométrie : la trigonométrie. La trigonométrie est la discipline mathématique qui traite des mesures dans un triangle ("trigono" vient de "triangle", et "métrie" vient de "mesure").
Introduction à l'analyse mathématique
Le calcul infinitésimal
Qu'est ce qu'est le calcul infinitésimal ?
Le calcul infinitésimal est une branche assez importante des mathématiques. En fait, le calcul infinitésimal est une branche du calcul mathématique s'intéressant à des calculs s'approchant de plus en plus de certaines valeurs. Ici, s'approcher signifie "diminuer le plus possible la distance entre la valeur obtenu par le calcul et la valeur que l'on cherche obtenir". En général, quand une valeur quelconque s'approche d'un terme "a", on dit que cette valeur tend vers "a". Pour cela, nous avons besoin de beaucoup d'outils précis.
Historiquement, il est difficile de savoir de quand, et surtout, par qui, provient le calcul infinitésimal. Déjà, le concept "d'approcher des valeurs" est utilisé depuis très longtemps en mathématiques. Archimède l'utilisé déjà dans la Grèce antique, avec la méthode d'exhaustion. La méthode d'exhaustion est une méthode (obsolète) de calcul d'une aire / d'un volume en se rapprochant successivement de cette valeur, par comblement du vide (ou retrait de matière) dans l'endroit calculé par des objets d'aire / volume connu. C'est une des méthodes possibles pour obtenir l'aire d'un triangle. Ces techniques furent améliorées dans les époques à venir, comme par le mathématicien arabe un mec intelligent. En Europe, elles permirent le développement de concept plus complexes, comme la méthode des indivisibles, méthode d'adégalisation de Fermat parue en 1636 (permettant d'obtenir des tangentes de courbes). À cette période, le défi principal des mathématiciens était de calculer des aires formés par des courbes. En 1669, un de ces problèmes est résolu par le grand un mec intelligent: les variations d'une courbe représente les variations des variations de l'aire formé par cette courbe. Nous y reviendrons plus tard, mais Newton découvre en fait le lien entre les courbes et une branche de calcul utilisant des valeurs souvent très petites et rapprochés : le calcul infinitésimal. En notation moderne, il découvre que l'aire sous la courbe représente l'opération "inverse" de la dérivée : l'intégrale. Grâce à ce concept, il va généraliser ce calcul aux fonctions réelles, et calculer des dérivés et intégrales de fonctions de plus en plus complexes. Malheureusement pour lui, ses démonstrations manquent de rigueurs. En 1674, le mathématicien un mec intelligentcomplète ses travaux, via une notation plus précise, et de nouveaux résultats très pratiques. Tout ça représente l'origine du calcul infinitésimal moderne (qui a énormément gagné en rigueur). À cause du manque de rigueur de Newton et de la proximité des deux résultats, le débat fait rage pour savoir qui a vraiment inventé ce premier prototype de calcul infinitésimal. En plus, ce manque de rigueur fait à ce que beaucoup de mathématiciens se méfirent de ce calcul. Cependant, l'acceptation générale viendra au 19ème siècle. À cette période, de nombreux mathématiciens, dont un mec intelligentou un mec intelligentparvinrent à formaliser de manière particulièrement rigoureuse ce calcul, grâce au concept de limite. Maintenant que la rigueur était là, ce calcul a pu finalement s'émanciper, pour permettre des résultats beaucoup plus acceptables, et des notions permettant de les généraliser : continuité, dérivation, intégration... C'est l'introduction de ces nouveaux concepts qui représentent la sémantique actuelle du calcul infinitésimal.
Une des branches du calcul infinitésimal est le calcul différentiel. Le calcul différentiel est une branche du calcul infinitésimal où les valeurs infinitésimales servent à étudier les variations de fonctions. L'idée ici est de s'approcher très près d'une partie de la fonction, pour voir comment ses images varient (si elles montent, descendent, et étudier comment). Bien que des idées similaires existaient avant le 17ème siècle, c'est à ce siècle (toujours avec nos problèmes de courbes) que se calcul se développe vraiment, avec le concept de "fonction" (alors qu'avant, les approximations se faisaient avec un peu n'importe quoi). À ce moment, les mathématiciens comprirent vite que un outil qui pourra être fondamental dans l'étude de ces fonctions et des courbes qu'elles génèrent représentera les droites "parallèles" à une partie de la courbe : les tangentes. C'est d'ailleurs à ça que servait l'adégalisation de Fermat, bien qu'elle manquait fortement de rigueur. Encore, c'est Newton qui, le "premier", propose quelque chose de potable (dans son fameux article de 1669) : les fluxions. Selon Newton, les fluxions représentent la vitesse à laquelle une fonction monte / descend en un point quelconque. Avec ces fluxions, Newton formalise la première tentative de "variation infinitésimale" de fonction (permettant aussi d'obtenir ces tangentes), et en crée une sorte de calcul basique. Malheureusement, cette méthode manquaient de rigueur (encore) et de généralisation. En fait, c'est Leibniz qui proposera une méthode un peu changée, bien plus rigoureuse et mieux notée, encore utilisée aujourd'hui.
La dernière branche du calcul infinitésimal est le calcul intégral. Le calcul intégral est une branche du calcul infinitésimal où les valeurs infinitésimales servent à étudier une fonction comme les variations infinitésimales d'autres fonctions. L'idée ici est de considérer une fonction quelconque comme la "dérivée" d'une autre, et donc de la considérer comme la représentation des variations infinitésimales d'une autre fonction. Encore une fois, les mathématiciens arrivent à lier les problèmes de calcul d'aire à ce concept de calcul intégral. De plus, dés le début, les mathématiciens ont compris que l'opération d'intégration et l'opération réciproque de l'opération de dérivation. Encore et toujours, c'est Newton et Leibniz qui introduirent le concept en Europe, et comme d'habitude ça manquait fortement de rigueur. Hors, les mathématiciens se rendirent vite compte que ce concept est plus difficile que le calcul différentiel, et que la rigueur devait être très importante. La formulation de l'intégral la plus utilisée est l'intégrale de un mec intelligentpubliée en 1867, que nous définirons plus tard. Cependant, bien que bien définie, elle excluait certaines fonctions, qui dans la logique pure, pourrait être intégrée. C'est pour ça que, en 1902, une nouvelle définition est proposée, par un mec intelligent.
Les limites
Les limites de suites
Les suites peuvent être étudiées grâce à l'une de leur propriété : les limites de suites. Une limite mathématique représente en quelque sorte une valeur d'on se rapproche indéfiniment quand, dans une fonction (admettant comme ensemble d'arrivée un espace métrique), on se rapproche indéfiniment d'un point précis (sans jamais réellement l'atteindre). Dans le cas précis d'une suite, une limite mathématique de suite représente en quelque sorte la valeur dont on se rapproche indéfiniment quand, dans une suite (admettant comme ensemble d'arrivée un espace métrique), on tend "n" vers "+ l'infini" (sans jamais réellement l'atteindre). En effet, "+ l'infini" est la seule "valeur" que l'antécédent d'une suite puisse "approcher" (d'un point de vue intuitif). Cette définition est une définition intuitive, mais trop peu rigoureuse et insuffisante.
D'un point de vue rigoureux, une limite mathématique de suite vers une valeur "v" est une valeur "v" telle que, pour tous nombre réel possible "x", il existe toujours un nombre entier naturel "a" tel que la distance entre n'importe quelle valeur de la suite à partir de ce nombre "a" et le nombre "v" sont inférieurs à "x". Dire ça est plus fort que de dire que la suite se contente juste de se "rapprocher", mais l'idée est similaire. En effet, si, pour toute valeur "x" aussi petite que l'on veut, il existe un élément de la suite qui est encore plus proche de "v" que "x" est petit (et donc, il existe un nombre naturel "a" permettant de savoir de quel élément de la suite il s'agit), alors une suite se rapproche de plus en plus d'une certaine valeur "v". L'avantage est que pour des "x" très petit, vous pouvez vous rapprocher très (voir infiniment) proche de cette valeur. Cependant, elle apporte un avantage : seulement une valeur peut être une limite de suite, là où la définition "intuitive" ne l'interdit pas. Prenons par exemple une suite ayant comme limite "2", et étant strictement décroissante. Dans ce cas, la suite se rapproche de "2", mais aussi de "1" (puisqu'elle est décroissante). Or, la distance entre "1" et la suite ne peut qu'être supérieur à 1 : la deuxième définition interdit ce genre de comportement (des nombres réels comme 0.5 ne respectent pas la définition). La définition mathématique ultra rigoureuse est proposé par le mathématicien un mec intelligent, et se note ainsi :
Dans le cas où la limite se rapproche de "+ l'infini" et de "- l'infini", la définition change un peu, mais le concept reste le même. Dans ce cas, une limite mathématique de suite vers une valeur "v" est une valeur "v" telle que, pour tous nombre réel possible "x", il existe toujours un nombre entier naturel "a" tel que la distance entre n'importe quelle valeur de la suite à partir de ce nombre "a" et le nombre "v" sont inférieurs à "x". Comme pour les suites finies, cette définition n'est intéressante que pour des suites très grandes ou très petites.
La notation usuelle pour noter la limite d'une suite utilise le mot "lim", au quel on note en petit au dessous "n", une flèche, et la valeur vers laquelle "n" tend. Si il n'y a pas d’ambiguïté, on peut se passer de la notation au dessous de la suite. Les parenthèses autour de la suite ne sont pas obligatoires.
En fait, prouver qu'une suite admet une limite quelconque revient à trouver le "a" pour tous nombres réel supérieur 0 à partir du quel la condition de la limite est vérifiée. Prenons un exemple très simple et intuitif : la suite qui, à "u(n)", associe le nombre "n".
Déjà, par intuition pure, on peut penser que la suite converge vers "+ l'infini". En effet, les valeurs semblent aller en grandissant "u(1) = 1", "u(2) = 2", "u(156) = 156"... Nous devons donc trouver si il existe un nombre entier naturel "a" tel que, pour tout nombre réel "x" supérieur à 0, toutes valeurs de la suite après l'indice "a" soit supérieur à "x". Cherchons les valeurs "b" de "N" tel que toutes valeurs de la suite "u(b)" soit supérieures à "x".
Donc, pour que cela marche, il nous faut un "b" supérieur à "x". Selon les propriétés des relations d'ordres sur "N", tous les nombres entiers naturels supérieurs à "b" marcheront eux aussi. À partir de là, trouver notre "a" ne sera pas très difficile. En effet, on pourrait dire que "a = x", et tout serait bon, mais un problème se pose : "x" n'est pas obligatoirement un nombre entier naturel. Donc, pour obtenir un nombre entier naturel, nous allons dire que "a" est égal à la partie entière de "x", à laquelle on ajoute 1 (ce qui représenta la fonction "ceil").
Donc, nous avons trouvé un "a" respectant la définition de la limite, cette suite tend vers "+ l'infini". Avec cette démonstration, on peut obtenir beaucoup de limites de suites "usuelles" en + l'infini. Déjà, la suite où l'on divise "1" par l'indice de l'élément actuel de la suite tend vers "0" (démontré ici). En effet, on découpe "1" en de plus en plus de valeurs, ce qui rend ces valeurs de plus en plus petites (et donc de plus en plus proches de 0). Comme on n'en prend qu'une de ces valeurs, alors elle se rapproche de 0.
Dans le cas de multiples de "n" avec une puissance positive, cela change un peu. En effet, la limite d'une suite qui représente le produit d'un nombre "a" avec "n" exposant un nombre supérieur à 0 représente "+ l'infini" si "a" est positif et "- l'infini" si "a" est négatif. Dans ces cas, il s'agit juste de "grossissement" de "n" comme nous l'avons vue plus tôt, légèrement altéré par "a", et accéléré par l'exposant.
Les limites de fonctions réelles
Avec des fonctions réelles, le concept de suite est plus complexe, mais bien plus complet. Déjà, comme on peut s'approcher indéfiniment de n'importe quelle valeur d'un nombre réel, une fonction réelle peut admettre une limite en une valeur finie. De plus, on peut approcher ce nombre avec des valeurs inférieures à ce nombre, ou supérieur à ce nombre (par exemple, on peut approcher 4 avec 3.9, 3.99, 3.999 ou avec 4.1, 4.01, 4.001). La valeur dont on se rapproche quand on fait tendre l'antécédent vers une valeur précise avec seulement des nombres supérieures à cette valeur est nommée limite à droite de la fonction en cette valeur. À l'inverse, La valeur dont on se rapproche quand on fait tendre l'antécédent vers une valeur précise avec seulement des nombres inférieures à cette valeur est nommée limite à gauche de la fonction en cette valeur. Ce concept ne sert à rien pour des limites en "+ l'infini" et "- l'infini", car il n'y a qu'un seul moyen de les approcher : valeur inférieure (+ l'infini-) ou supérieure (- l'infini). Si la limite à droite d'une fonction en une valeur est la même que la limite à droite en cette valeur, on parle simplement de "limite" en cette valeur. Un exemple très parlant de limite à droite différente de limite à gauche est celui de la fonction qui associe à chaque valeur "x" l'inverse de "x" : la limite en 0 à gauche est "- l'infini", là où la limite en 0 à droite est "+ l'infini".

Dans tous les cas, il existe des définitions très rigoureuses de ces concepts. En effet, dans le cas des limites finies en une valeur finie, une limite mathématique de fonction en une valeur "a" est une valeur "v" telle que, pour tout nombre réel possible "x", il existe toujours un nombre réel "b" (supérieur à "a" si on calcul la limite à droite, et inférieur sinon) tel que toute valeur entre "a" et "b" admet comme image une distance à "v" inférieure au nombre "x". Pour formaliser le concept de valeurs plus proche de "a" que "b", on va utiliser le formalisme des intervalles. En effet, toute valeur entre "]a - b, a + b[" (pour "b" positif) est plus proche de "a" que "b". Pour la limite à droite, on a :
Dans le cas où l'on calcule la limite à gauche :
Cependant, il existe aussi des limites infinies, en une valeur finie. Dans ce cas, une limite mathématique infinie de fonction en une valeur "a" est l'un des deux infinies ("+ l'infini" ou "- l'infini") tel que, pour tout nombre réel possible "x", il existe toujours un nombre réel "b" (supérieur à "a" si on calcul la limite à droite, et inférieur sinon) tel que toute valeur entre "a" que "b" admet comme image une valeur supérieure au nombre "x". Cette définition est assez similaire à celle vue pour les suites, à la différence prêt que l'antécédent se rapproche d'une valeur précise, et pas d'un infini. Donc, on peut aussi se rapprocher à droite ou à gauche. Pour la limite à droite, on a (dans le cas où l'on se rapproche de "+ l'infini", puis "- l'infini") :
Pour la limite à gauche, on a (dans le cas où l'on se rapproche de "+ l'infini", puis "- l'infini") :
Nous devons ces définitions à Karl Weierstrass, qui les aurait énoncé dans le courant des années 1860. Comme vue plus haut, prouver qu'une fonction admet une limite finie quelconque en un point "a" revient à trouver le "b" pour chaque nombre réel "x" supérieur 0 à partir du quel la condition de la limite est vérifiée (chaque valeur entre "b" et "a" est à une distance de la limite inférieure à la valeur "x"). Dans ce cas, seule des valeurs très petites de "x" nous intéressent. À l'inverse, prouver qu'une fonction admet une limite infinie en un point "a" revient à trouver le "b" pour chaque nombre réel "x" supérieur 0 à partir du quel la condition de la limite est vérifiée (chaque valeur entre "b" et "a" est supérieure (ou inférieure, en "- l'infini") à la valeur "x" (ou "-x", en "- l'infini")). Dans ce cas, seule des valeurs très grandes de "x" nous intéressent. Prenons un exemple que nous avons déjà vue : la fonction qui, à chaque "y" réel, lui associe son inverse par la multiplication "1/y".
Cette fonction est définie sur tout "R", sauf à un endroit : "0". Or, toute valeur aussi proche que l'on veut de "0" est définie : on peut trouver une limite en "0". Par observation, on s'attend à trouver une limite de "- l'infini" vers la gauche, et de "+ l'infini" vers la droite.

Commençons par calculer la limite à droite. Prenons un nombre réel "x" quelconque supérieur à 0. Supposons une valeur "b" supérieur à 0 tel que "f(b)" sont supérieur à "x".
On peut donc déduire que "b" doit être inférieure à l'inverse "x", car la fonction "inverse" change l'ordre.
Ici, "b" existe si l'inverse de "x" existe : cela est vrai car "x" est différent de "0". Par équivalence, toute valeur positive inférieure à "b" est inférieure à l'inverse de "x", et donc toute inverse de valeur positive supérieure à l'inverse "b" est supérieure à "x". Appelons cette nouvelle valeur "c".
Par définition, "c" appartient à l'intervalle ]0, b[ (qui s'écrit aussi ]0, 0 + b[). Pour rappel, on est sur qu'il existe un "b" respectant ces propriétés. Donc, on peut reformuler notre expression :
C'est exactement la définition d'une limite à droite de "+ l'infini" en 0 : notre fonction admet une limite à droite de "+ l'infini" en 0. Maintenant, procédons dans le cas de la limite à gauche. Prenons un nombre réel "x" quelconque supérieur à 0. Supposons une valeur "d" inférieure à 0 tel que "f(d)" soit inférieur à "-x".
On peut donc déduire que "d" doit être inférieure à l'inverse "x", car la fonction "inverse" change l'ordre.
Ici, "d" existe si l'inverse de "-x" existe : cela est vrai car "-x" est différent de "0". Par équivalence, toute valeur négative supérieur à "d" est supérieure à l'inverse de "-x", et donc toute inverse de valeur négative inférieure à l'inverse "d" est inférieure à "-x". Appelons cette nouvelle valeur "c".
Disons que l'opposé par l'addition de "d" est nommé "b" (qui est donc supérieur à 0). Par définition, "c" appartient à l'intervalle ]d, 0[ (qui s'écrit aussi ]0 + d, 0[, ou ]0 - b, 0[). Pour rappel, on est sur qu'il existe un "d" respectant ces propriétés, et donc un "b" qui respecte aussi ces propriétés. Donc, on peut reformuler notre expression :
C'est exactement la définition d'une limite à gauche de "- l'infini" en 0 : notre fonction admet une limite à gauche de "- l'infini" en 0.
Il est possible de faire un lien très pratique entre les limites de suites et les limites de fonction. Déjà, pour toute fonction réelle, si la fonction est définie pour tous les nombres naturels, alors il existe une restriction de cette fonction sur "N", en faisant donc une suite. Donc, dans ce cas, toute fonction réelle permet de définir une suite ayant le même comportement que la fonction. Cela est dû au fait que N soit inclu dans "R". Avec ça, on peut prouver quelque chose de très pratique : la limite en "+ l'infini" de la fonction réelle est la même que la limite de la suite qui lui est associée. Donc, démontrer des résultats avec des limites en "+ l'infini" de fonctions réelles revient à les démontrer pour les suites associées.
Les opérations sur les limites
En plus de la définition, il est possible d'utiliser une autre façon pour obtenir des limites : utiliser du calcul de limite. En effet, si vous avez une fonction plus ou moins complexe qui peut être découpée en une opération entre d'autres fonctions quelconques, alors on peut calculer une limite de cette fonction en étudiant les limites des fonctions constituant l'opération. Grâce à ça, on limite l'utilisant de la lourde définition d'une limite.
Le cas le plus simple correspond à la somme de fonctions. En effet, dans une fonction "f" représentant la somme d'autres fonctions, la limite de "f" en une valeur représente la somme des limites en cette valeur des fonctions qui constituent "f", si ses dernières sont finies. La démonstration de ce résultat n'est pas si complexe que ça, mais demande une disjonction de cas précise et très longue (traitée ici). C'est avec ces résultats que nous pouvons trouver facilement la limite de "3x² + 2x" en "+ l'infini" : "3x²" tend vers "+ l'infini", "2x" aussi, donc "3x² + 2x" tend vers + "l'infini".
Par contre, la limite en "- l'infini" de "5 + inverse de x" en "+ l'infini" est 5 : "5" tend vers "5", inverse de "x" tend vers 0, alors "5 + inverse de x" tend vers 5. C'est la même chose en "+ l'infini".
Cependant, quel est la limite de cette fonction en "0" ? Il est assez évident que la limite à gauche est "- l'infini" et la limite à droite et "+ l'infini". En effet, si une limite en une valeur représente la somme d'une valeur finie et d'un infini, alors l'infini l'emporte sur la valeur finie. La démonstration implique aussi une grosse disjonction de cas, présente juste en bas de celle des limites finies. Donc, la limite en 0 à gauche de "5 + inverse de x" est "- l'infini", et la limite en 0 à droite de "5 + inverse de x" est "+ l'infini". Grâce à des propriétés basiques, on se rend facilement compte que c'est la même chose pour des soustractions, en utilisant les opposés par l'addition (en sachant que, par logique pure, l'opposé de "+ l'infini" est "- l'infini", et l'opposé de "- l'infini" est "+ l'infini").
De plus, il est possible d'obtenir des propriétés similaires avec la multiplication. Les démonstrations totales sont très similaires à celles de l'addition de limites, est présentes juste ici. Déjà, si deux fonctions tendent en une valeur "a" (ou en un infini) vers respectivement "v" et "w" finis, alors le produit de ces deux fonctions tend en "a" (ou en l'infini nécessaire) vers "v * w". Quelque chose d'assez intéressant : cela marche aussi si "v" ou "w" est égal à 0(bien que cela pose problème dans le cas de la disivion, et nous verrons plus tard comment y remédier). Prenons un exemple très simple : la fonction "f(x) = 5", "g(x) = inverse de x" et "h(x) = f(x) * g(x)".
Cette règle est un peu plus compliqué dans le cas des infinis. Cependant, pour utiliser le produit avec des limites en des infinis, il faut utiliser la règle des signes avec les infinis, ce qui est parfaitement possible. En effet, si deux fonctions tendent en une valeur "a" (ou en un infini) vers respectivement "v" et "w" infinis, alors le produit de ces deux fonctions tend en "a" (ou en l'infini nécessaire) vers un des deux infinis, en appliquant la règle des signes : si les deux infinis sont positifs, l'infini final l'est aussi, si les deux infinis sont négatifs, l'infini final l'est aussi, mais si l'un des deux est positif et l'autre négatif, alors l'infini final est négatif. Prenons un exemple très simple : la fonction "f(x) = -x²", "g(x) = -x" et "h(x) = f(x) * g(x)" (qui vaut donc "x au cube").
On peut cependant mélanger les infinis avec les valeurs finies, pour obtenir des résultats particulièrement intéressant. En effet, si deux fonctions tendent en une valeur "a" (ou en un infini) vers respectivement "v" fini (différent de 0) et vers un des deux infinis, alors le produit de ces deux fonctions tend vers un des deux infinis, auquel on applique la règle des signes (si "v" est négatif et l'infini aussi, alors "+ l'infini", si "v" est négatif et l'infini positif, alors "- l'infini", si "v" est positif et l'infini négatif, alors "- l'infini", et si "v" est positif et l'infini aussi, alors "+ l'infini"). Cela ne marche que si "v" est différent de 0 (sinon, on n'a pas assez d'informations pour calculer la limite). Prenons un exemple très simple : la fonction "f(x) = 5", "g(x) = -x" et "h(x) = f(x) * g(x)".
Abordons un dernier sujet : les divisions. Pour simplifier les démonstrations, nous allons utiliser la propriété algébrique qui énonce que une division est une multiplication par un inverse : nous allons donc nous limiter aux inverses. De manière assez évidente, l'inverse d'une fonction tendant vers une valeur finie "a" qui n'est pas "0" en n'importe quoi (valeur finie ou "+ l'infini") tend vers "inverse de a" en cette valeur. Donc, notre fonction "5 + 1/x" qui tend vers "5" en "+ l'infini" tend vers "1 / 5" en "+ l'infini" (l'inverse de cette fonction est "1 / (5 + 1 / x)", qui après vérification, tend bien vers "1 / 5").
Tout cela se corse quand "0" ou un infini est impliqué. En fait, l'inverse d'une fonction tendant vers "0" en n'importe quoi (valeur finie ou "+ l'infini") tend vers un infini (+ ou -, selon la fonction) en cette valeur. Par exemple, notre fonction "inverse de x", qui tend vers "0" en "+ l'infini", admet comme inverse "x", qui tend bel est bien vers "+ l'infini" en "+ l'infini". De manière réciproque, l'inverse d'une fonction tendant vers un infini en n'importe quoi (valeur finie ou "+ l'infini") tend vers "0" en cette valeur. Encore une fois, notre fonction "x", qui tend vers "+ l'infini" en "+ l'infini", admet comme inverse "inverse de x", qui tend bel est bien vers "0" en "+ l'infini". La question ici : si notre fonction tend vers "0", vers quel infini se diriger (+ ou -) ? La réponse dépend entièrement de la fonction de départ. En fait, il nous faut savoir si la fonction qui s'approche de "0" reste dans le côté des positifs ou le côté des négatifs(si elle le fait du côté des négatifs, on n'a "- l'infini", sinon on a "+ l'infini"). Par exemple, comme "l / x" n'est jamais négatif pour "x" supérieur à 0, alors on reste dans le côté positif, et son inverse admet comme limite "+ l'infini" en "+ l'infini". C'est l'inverse pour "-1 / x".
Généralisons ce résultat avec un résultat très important : le cas de la composition. Effectivement, la composition d'une fonction "f" et d'une fonction "g" tend en "a" vers la limite de "f" en la limite de "g" en "a". Bien que la démonstration soit, encore une fois, ignoble, ce résultat est assez évident. En effet, si nous faisons tendre "x" vers "a", alors "g(x)" se rapproche de sa limite en "a", et nous passons cette valeur (se rapprochant de la limite de "g" en "a") à "f".
Les comparaisons asymptotiques
Grâce aux limites de suites, on peut comparer des suites selon la façon dont se comporte la limite de la suite.
Le premier type de comparaison est la négligeabilité / prépondérance de suite. Une suite mathématique "u" est dite négligeable devant une suite "v" lorsque "v" se rapproche plus vite de sa limite que "u". Comme toutes les "premières" définitions ici, cette définition est intuitive. Pour la rendre plus précise, nous allons préciser le fait de se "rapprocher plus vite" de la limite. En fait, si "u" est négligeable devant "v", alors la limite de "u" divisé par "v" est 0. En effet, si "v" se rapproche plus vite, alors on divise "u" par quelque chose de beaucoup plus grand : on se rapproche de 0. Cependant, pour que cette façon de faire marche, il faut que "v" ne soit pas égale à 0. D'ailleurs, comme il peut exister une grande quantité de suites négligeables devant une autre, alors les suites négligeables devant une autre forment un ensemble. La notation de Landau associé revient à dire que "u" appartient aux suites négligeable de "b", notées "o(v)".
Comme nous avons une fraction, on peut trouver une équivalence en multipliant des deux côtés par un facteur précis, ici une autre suite "w". Dans ce cas, deux suites sont équivalentes si cette nouvelle suite "w" tend vers 0 (pas plus fort que "v" tend vers "+ l'infini", mais fort quand même).
Comme pour les limites, ce concept fonctionne de manière similaire avec les fonctions, à la différence prêt que l'on peut l'utiliser en des valeurs finies de la fonction. Toujours comme les limites, nous devons préciser en quelle valeur de la fonction la relation de négligeabilité est respectée. Pour cela, nous devons indiquer sous le symbôle "appartient" cette valeur.
Avec ce concept, l'idée est de savoir quelle partie d'une formule se rapproche moins vite de la limite que les autres. D'un point de vue intuitif, étudier cette partie revient à étudier une version "moins rapide" des autres parties, et donc de la formule générale. Prenons un exemple : démontrons que, en "+ l'infini", la fonction "f" associant "x" à "x" est négligeable devant la fonction "g" qui associe "x" à "x²". D'un point de vue intuitif (que l'on peut forger avec une comparaison de graphe), ce résultat est évident.
La démonstration est en réalité assez simple. En effet, pour démontrer ce résultat, nous devons démontrer l'existence d'une fonction "w" tendant vers "0" en "+ l'infini", permettant de passer de "g" à "f" grâce à un produit. Donc, nous devons trouver un moyen de passer de "x²" à "x" grâce à un produit. Or, multiplier "x²" par "1/x" donne "x" : la fonction que l'on cherche à donc cette forme. Elle existe si "x" est différent de 0 : c'est le cas, car nous cherchons une limite en "+ l'infini", et que "x" doit être très grand, et donc qu'on peut le fixer comme "supérieur à 0".
Or, la fonction qui associe "x" à son inverse tend vers "0" en "+ l'infini". Donc, "w" tend vers "0" en "+ l'infini" : la fonction "f" est négligeable devant "g" en "+ l'infini", et "x" est négligeable devant "x²" en "+ l'infini".
À l'inverse, on peut prouver que quand "x" tend vers "0", alors c'est "x²" qui est négligeable devant "x". Donc, démontrer l'existence d'une (nouvelle) fonction "w" tendant vers "0" en "0", permettant de passer de "f" à "g" grâce à un produit. Ici, nous allons trouver un moyen de passer de "x" à "x²" grâce à un produit. Or, multiplier "x" par "x" donne "x²" : la fonction que l'on cherche à donc cette forme.
Or, la fonction qui associe "x" à "x" tend vers "0" en "0". Donc, "w" tend vers "0" en "0" : la fonction "g" est négligeable devant "f" en 0, et "x²" est négligeable devant "x" en 0.
Si on avait utilisé notre première fonction "w" (la fonction inverse), notre "w" aurait tendu vers "+ l'infini", ce qui est parfaitement cohérent, mais pas parfaitement égale à cette définition kà, qui est plus forte. En plus, on aurait eu un problème si "x = 0" : cette fonction n'a pas ce problème.
La continuité
Qu'est ce qu'est la continuité mathématique ?
Les fonctions réelles peuvent posséder une propriété assez connue : la continuité. Une fonction réelle est continue en une valeur "a" si "a" appartient à son domaine de définition et si la valeur de sa limite à droite en "a" est égale à la valeur de sa limite à gauche en "a", et que cette limite est finie. En d'autres termes, pour rappel, on dit qu'il existe une limite en "a" (sans autres précisions) si la limite à gauche et à droite est égale. Donc, une fonction est continue en "a" si il existe une limite finie en "a" (qui vaut donc "f(a)"). À l'inverse des limites, la continuité oblige "a" à appartenir à son domaine de définition. D'un point de vue rigoureux, on peut le définir comme cela (en modifiant un peu la définition de la limite) :
Sinon, on peut simplifier la définition, en utilisant le formalisme des limites. En effet, si une fonction "f" est continue en un point "a", alors :
On peut cependant renforcer cette définition de manière assez simple. En effet, une fonction réelle est continue sur un ensemble "I" si "f" est continu pour toutes les valeurs de cet ensemble. Cela implique que des fonctions peuvent être continues sur tout leur ensemble de définition, voir sur tout "R". La définition rigoureuse est assez similaire.
Un exemple très basique des fonctions continues sont les fonctions de la forme "a * x^b" avec "a" un réel quelconque et "b" un nombre entier naturel. Cette fonction est continue sur tout son domaine de définition, et donc sur tout "R". Définissons la fonction "f" définies comme "f(x) = a * x ^ b".
En appliquant les démonstrations vues plus haut, il est assez facile de trouver que, pour tout "x", la limite à gauche de cette fonction est "a * x ^ b".
Or, cette limite est exactement la même qu'à droite.
Ces deux limites sont parfaitement égales. Donc, cette fonction est continue sur son ensemble de définition, et donc sur "R".
Cependant, il existe des fonctions qui devraient théoriquement être continue, mais où l'une des conditions de la continuité en un point n'est pas remplie : un des points est hors de l'ensemble de définition. En effet, si un point "a" est hors de l'ensemble de définition, mais que la limite à droite et à gauche de la fonction sont égales, il est dommage de ne pas pouvoir la considérer continue sur son ensemble de définition, et ce point inclut. Cependant, il exsite un moyen d'éviter ce problème : le prolongement par continuité. En fait,
Bien que cette fonction semble valoir "0" en "-1", elle n'est pas continue en "-1", car elle n'est pas définie en "-1". Vérifions que sa limite à droite et à gauche en "0" sont les mêmes. Pour cela, nous savons que si cette fonction tend vers "0" en "1", alors son inverse tend vers "+ l'infini" en "1". Or, l'inverse de cette fonction est "(x + 1)/(x - 1)²", que l'on peut écrire "(x + 1)/(x² - 2 * x + 1)". Or, en "1", "(x + 1)" vaut "2", et "(x² - 2 * x + 1)" vaut "0" (et n'est jamais strictement négative sur son ensemble de définition) : "(x + 1)/(x² - 2 * x + 1)" tend donc vers "+ l'infini" des deux côtés, et notre fonction de départ tend vers "0" des deux côtés. Finalement, on a donc démontré que la limite à droite et à gauche de notre fonction est "0", il ne manque plus que de définir la valeur de l'extension en "1" comme égale à "0" pour pouvoir la considérer continue en "0". Donc, la fonction "g" tel que "g(x) = f(x)" pour "x" appartenant à "D" et tel que "g(x) = 0" pour "x = 1" est un prolongement de la fonction "f", continue sur "D" auquel on ajoute "a".
La continuité nous permet d'énumérer de nombreux théorèmes sur les fonctions réelles, que nous seront très pratique par la suite. Le premier que nous allons voir est le théorème des bornes atteintes. Le théorème des bornes atteintes (aussi nommé théorème des valeurs extrêmes, ou théorème de Weierstrass) est un théorème stipulant que, si une fonction est continue sur un intervalle bornée, alors elle admet un maximum et un minimum sur cet intervalle, et les attend tous les deux.
L'arithmétique de la continuité
Comme avec les limites, il existe une sorte d'arithmétique entre des fonctions continues, pour en déduire d'autres fonctions continues.
On peut commencer avec l'addition. En effet, la somme / différence de deux fonctions continues représente une fonction continue. La démonstration est beaucoup plus simple que celle avec les limites, est présente juste ici. On peut très facilement le généraliser dans le cas d'un ensemble plus grand, voir de tout leur ensemble de définition si possible. Par exemple, la fonction "3x² + 4x - 2" est donc continue, car "3x²", "4x" et "-2" le sont aussi.
Dans la même idée, le produit de deux fonctions continues représente une fonction continue. La démonstration est aussi très simple, est présente juste ici.
Généralisons ce résultat, avec un autre plus important, et aussi bien plus pratique. En effet, la composition de deux fonctions continues représente une fonction continue. Encore une fois, la démonstration est aussi très simple, est présente juste ici.
Les séries réelles
Une extension des sommes
Les séries représentent une version "avancée" des sommes, couplées au concept de suite. En effet, une série est un objet permettant d'étudier le comportement d'une suite mathématique "s" définie via une autre suite mathématique "u", où le "n-ième" terme de la suite "s" représente la somme de tous les termes de "u" inférieurs ou égaux à "n". D'un point de vue vocabulaire, on peut tisser un lien entre la série et "u" : cette série est dite série de terme général "u indice n". De plus, les différents "s(n)" sont nommés sommes partielles de la série d'ordre "n".
Finalement, la valeur de "s(n)" quand "n" tend vers l'infini est nommé "somme" de la série. C'est généralement l'étude de cette limite qui rend le concept de série intéressant. Si cette limite représente un infini ou n'existe pas, on dit que la série diverge. À l'inverse, si il existe une limite finie, on dit qu'elle converge.
Pour cela, une des façons les plus simples de faire est d'obtenir la valeur de "s(n)" comme une valeur ne contenant pas de somme, et donc de simplifier la forme. C'est avec cette technique que nous pouvons calculer la série de terme général "n".
Ici, "u(n)" est une suite arithmétique de raison "1". Donc, obtenir la formule d'une somme partielle de "u(n)" est très simple.
Nous reconnaissons ici un polynôme de degré 2, avec un coefficient dominant positif : cette suite tend vers l'infini. Donc, la série diverge.
Étudions maintenant un exemple de série convergente. Prenons la série de terme général "inverse de 2 exposant n".
Ici, "u(n)" est une suite géométrique de raison "1/2". Donc, obtenir la formule d'une somme partielle de "u(n)" est très simple.
Ici, nous voyons facilement que, si "n" tend vers l'infini, "s(n)" tend vers 2. Donc, la série converge.
Introduction à la topologie
Qu'est ce qu'est la topologie ?
Les espaces topologiques et les ouverts
Après avoir introduit le concept de limite et de continuité en analyse, parlons de la branche des mathématiques qui les formalise le mieux : la topologie. Avant de définir la topologie, nous avons quelques autres concepts à définir.
Commençons par nous placer dans un ensemble quelconque, que nous nommerons "E". En topologie, nous étudions généralement "E" par certaines de ses parties précises : les ouverts. De manière intuitive, un ouvert est une partie d'un ensemble qui ne contient aucun élément de sa frontière. Ici (toujours de manière intuitive), la frontière d'un ouvert est la partie de l'ensemble contenant cette ouvert qui limite les éléments à l'intérieur de l'ouvert de ceux à l'extérieur de l'ouvert. Le meilleur moyen d'introduire ce concept est avec un exemple. En effet, un intervalle réel ouvert est un ouvert de l'ensemble des réels. Prenons l'intervalle "]3; 5[". Ici, les éléments limitant l'intérieur et l'extérieur de cet intervalle sont "3" et "5" : ils représentent la frontière de l'intervalle. De plus, l'intervalle ne contient pas ces éléments : il ne contient aucun élément de sa frontière. Donc, il s'agit d'un ouvert de "R". Ici, les notions de "limite entre l'intérieur et l'extérieur" dépend de l'ensemble dans lequel on travaille. Généralement, la frontière d'un ouvert est noté avec le symbole "d rond" :
Ici, les notions d'extérieurs et intérieurs de l'intervalle sont basés sur les notions de "supérieur ou égal" et "inférieur ou égal". En effet, "R" privé de cet intégrale représente "]- infini;3] U [5; + infini[". Pour parler plus en précision de tout cela, on peut introduire du vocabulaire plus spécifique. Par exemple, un fermé est une partie d'un ensemble tel que son complémentaire dans l'ensemble soit un ouvert. Donc, "]- infini;3] U [5; + infini[". En fait, un intervalle fermé est une partie fermée de l'ensemble des réels. Prenons l'intervalle "[3; 5]", de frontière toujours "3" et "5" (comme ils font partie de l'intervalle, celui-ci n'est pas un ouvert). Ici, "R" privé de cet intervalle représente "]- infini;3[ U ]5; + infini[". Dans cet ensemble, il n'y a pas de frontière vers "+ l'infini" ou "- l'infini", puisque aucun élément de "R" n'est en dehors de "]- infini;+ infini[": le priver de "[3, 5]" ne supprime que des éléments entre 3 et 5. Or, la frontière de ce nouvel ensemble est donc {3, 5}, qui ne font pas partie de l'ensemble : il s'agit donc d'un ouvert.
De plus, l'adhérence d'une partie "F" d'un ensemble "E" est une partie de "E" contenant "F" et la frontière de "F". D'un point de vue plus rigoureux, l'adhérence d'une partie "F" est l'intersection de tous les fermés contenant "F" (et donc, il s'agit du "plus petit" fermé qui contient "F"). On peut en déduire plein de propriétés très simples, mais assez intéressantes. Si une partie "F" est un fermé, alors "F" contient déjà sa frontière : "F" est égal à son adhérence. Cependant, si cette partie "F" est ouverte, alors l'intersection de "F" et de son adhérence donne "F", et priver "F" à l'adhérence de "F" donne la frontière de "F". Généralement, un point appartenant à l'adhérence d'une partie "F" est nommé un point adhérent à "F".
Généralement, on peut définir un ensemble d'ouverts de "E" comme un ensemble de parties de "E", généralement noté "T", nommé une topologie de "E". Pour obéir à toutes les propriétés des ouverts, cette topologie "T" doit obéir à quelques règles précises. Premièrement, l'ensemble vide et "E" entier sont des ouverts de "E", et donc sont présents dans "T". Deuxièmement, l'union de n'importe quel élément de "T" est un autre élément de "T". Donc, l'union de deux ouverts est toujours un ouvert.
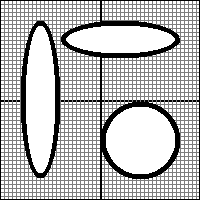
Finalement, l'intersection de n'importe quel élément de "T" est un autre élément de "T". Donc, l'intersection de deux ouverts est toujours un ouvert. En fait, dire que un ensemble de parties de "E" obéit à ces 3 règles équivaut à dire que cet ensemble de parties est une topologie de "E". Cette équivalence nous sera très utile pour de futures démonstrations.
Grâce à ça, on peut définir le concept d'espace topologique. En fait, un espace topologique représente l'étude d'un ensemble "E" avec une topologie "T" associée. Et donc, on peut définir le concept général de topologie. La topologie est l'étude des espaces topologiques et de leurs propriétés possibles. L'espace topologique le plus utilisé est celui qui est facilement ostensible avec les nombres réels : la topologie usuelle des nombres réels (c'est son nom).
Avec les ouverts topologiques et les espaces topologiques, on peut définir un concept assez similaire, mais pas exactement pareil : le voisinage d'un point topologique. Le voisinage d'un point "a" d'un ensemble d'un espace topologique est une partie de cette ensemble qui inclut un ouvert auquel appartient "a". Il n'est pas exclu qu'un voisinage de "a" déborde d'un des ouverts contenant "a". Généralement, l'ensemble des voisinages possibles de "a" sont notés "V(a)", où le "V" est généralement marqué en écriture gothique. Ce "V(a)" est donc un ensemble de parties de l'ensemble de départ.
Parlons de deux types de points précis dans un espace topologique : les points limite et points d'accumulation. Un point limite d'une partie "A" d'un espace topologique "E" est un point de "E" tel que tous ses voisinages contiennent au moins un élément de "A" (autre que "x"). À l'inverse, si un point n'est pas limite de "A", il est dit point isolé de "A". Le concept de point d'accumulation est un peu différent. Un point d'accumulation d'une partie "A" d'un espace topologique "E" est un point de "E" tel que tous ses voisinages contiennent une infinité d'éléments de "A" (autre que "x"). Selon certains auteurs, les points limites et points d'accumulations sont parfaitement égaux, et selon d'autres, ils prennent les définitions indiqués ici. Si nous choisissons de différencier ces deux définitions, il est assez évident qu'un point d'accumulation est un point limite, bien que rien ne prouve que l'inverse soit vrai.
L'exemple le plus "bateau" de topologie sur un ensemble "E" non-vide est ce que l'on appelle la topologie grossière de "E". En fait, la topologie grossière (ou topologie triviale) associée à un ensemble E est une topologie sur "E" où les deux seuls ouverts sont l'ensemble vide et "E" entier. En effet, intuitivement, l'ensemble vide ne contient aucun élément de sa frontière (il ne contient aucun élément), et "E" pareil (il n'a pas de frontière, il ne peut donc pas la contenir). En plus l'ensemble contenant l'ensemble vide et "E" respecte parfaitement les conditions pour être une topologie.
En plus, il est possible de définir des topologies sur des parties "F" d'un ensemble "E" muni d'une topologie. Le type le plus utilisé parmi ces topologies est la topologie induite. La topologie induite d'une partie "F" d'un ensemble "E" (possédant lui même une topologie) est une topologie sur "F" où l'ensemble des ouverts est l'ensemble des intersections entre chaque ouvert de "E" et "F". Dans ce cas, "F" est nommé un sous-espace de "E".
De manière analogue, nous pouvons aussi définir des sous-structures, avec non pas des ensembles topologiques, mais des topologies elles mêmes. Pour cela, nous allons utiliser le concept de finesse topologique. En topologie, une topologie sur "E" est dite plus fine qu'une autre topologie sur "E" si la deuxième topologie est incluse dans la première. Intuitivement parlant, la topologie la plus fine est celle qui contient le plus d'éléments.
Parlons d'un autre moyen très pratique de définir une topologie : les bases topologiques. Une base d'un espace topologique "T" sur un ensemble "E" est un ensemble de parties de "E" ouverts dans "T", dont l'union permet de générer tous les ouverts de "T". L'idée est donc de définir des ouverts de "base" de "T", tel que tous les ouverts de "T" peuvent être décrit avec des parties de la base. Pour une topologie "T" et une base "B" de "T", on peut noter :
Cependant, il est possible d'affaiblir ce concept avec un autre : les prébases. Une prébase d'un espace topologique "T" sur un ensemble "E" est un ensemble de parties de "E" tel que toutes ces parties soient des ouverts de "T". Pareil : l'utilité d'une prébase est de l'utiliser pour définir un nouvel espace topologique, et plus précisément le plus fin tel que tous les éléments de la prébase soient des ouverts. Ici, tout ensemble de parties de "E" peut représenter une prébase, mais certaines sont bien plus intéressantes que d'autres. Ici, la topologie la plus fine qui permet de rentre tous les éléments de la prébase ouverts est nommé la topologie engendrée par cette prébase.
D'ailleurs, on peut (sans connaître obligatoirement la topologie engendrée) dire si une prébase est une base de sa topologie engendrée. Pour qu'une prébase soit une base de sa topologie engendrée, il faut qu'elle respecte deux propriétés : tous les éléments de "E" doivent appartenir à une partie de la base et l'intersection finie d'élément de la base doit donner une union d'éléments de la base. La première propriété s'assure que les parties de la prébase recouvrent bien "E". Pour la deuxième propriété, il s'agit d'une propriété permettant de s'assurer que les ouverts obtenus avec ces ouverts de "base" obéissent aux propriétés des ouverts (vues plus haut).
Sur un ensemble muni d'une relation d'ordre quelconque, il est possible de définir une topologie extrêmement efficace : la topologie de l'ordre. La topologie de l'ordre est une topologie sur un ensemble "E" ordonné engendré par l'ensemble des parties de "E" prenant une des 3 formes suivants : c'est l'ensemble des points strictement entre deux autres, ou l'ensemble des points strictement supérieurs à un point, ou l'ensemble des points strictement inférieurs à un point. Ici, l'ordre ne doit pas obligatoirement être total pour que la topologie existe (bien que si il l'est, la topologie a plus de propriétés). Voici l'écriture mathématique de ces 3 types d'ouverts qui engendrent cette topologie :
Ici, un ensemble ordonné muni d'une topologie est nommée un espace topologique ordonné. C'est par exemple le cas dans "R" : comme l'ensemble que nous venons de citer représente exactement l'ensemble des intervalles réels ouverts, une topologie de l'ordre existe bel et bien sur l'ensemble des nombres réels.
Les filtres topologiques
Un concept assez proche de celui de "topologie" sur un ensemble est le concept de filtre. Un filtre topologique sur un ensemble "E" est un ensemble de parties de "E" (qui ne contient d'ailleurs pas l'ensemble vide) tel que toute intersection d'éléments de ce filtre donne un nouvel élément de ce filtre et que, si un élément appartient à ce filtre, et qu'une partie de "E" inclut cet élément, alors cette nouvelle partie de "E" appartient au filtre. Ce concept est très... peu intuitif, mais d'un point de vue purement mathématique, un filtre "F" sur un élément "E" respecte ces 3 propriétés :
L'exemple le plus simple est ce que l'on appelle le filtre principal. Un filtre principal sur un ensemble "E" engendré par une partie "A" de "E" est un filtre sur "E" représentant tous les éléments qui inclus "A". Généralement, ce filtre est noté avec le "F" général de la notion du filtre, avec le nom de la partie en indice. Il est assez facile de démontrer que ce type d'ensemble de parties est un filtre. Déjà, l'ensemble vide ne contient pas "A", il est donc hors de cet ensemble. De plus, l'intersection de tous les éléments de ce filtre forme une partie qui contient "A", et donc un élément de ce filtre.
C'est la même chose pour l'union.
Intuitivement parlant, un filtre principal d'une partie "A" sur un ensemble "E" représente l'ensemble des parties de "E" qui incluent "A". Par exemple, prenons une partie verte, et dessinons quelques éléments de son filtre principal en rouge :
Cependant, le filtre qui va le plus nous intéresser est un filtre utilisant les voisinages. En effet, pour un point d'un espace topologique "x", l'ensemble des voisinages de "x" forme un filtre de l'espace. Déjà, l'ensemble vide ne contient pas d'ouvert contenant "x", il est donc hors de cet ensemble. De plus, l'intersection de tous les éléments de ce filtre forme un voisinage de "x", qui fait donc partie du filtre. Finalement, l'union de tous les éléments de ce filtre forme un voisinage de "x", qui fait donc partie du filtre.
Un des concepts les plus importants avec les filtres est le concept de base de filtre. Une base d'un filtre topologique sur un ensemble "E" est un ensemble de parties de "E" tel que toutes les parties qui incluent un élément de la base représente un filtre.
Les propriétés topologiques de base
Dans pas mal de théorèmes topologiques, une propriété précise revient souvent : la connexité topologique. En topologie, un espace topologique est dit connexe si il est intuitivement composé que d'un seul morceau. Dans ce cas, un schéma s'impose pour bien comprendre ce concept. Voici un espace topologique (un disque), sous-espace par la topologie induite d'un plan 2D normal, connexe :
Il n'est constitué que d'un seul morceau. Voici maintenant un espace, toujours sous-espace par la topologie induite d'un plan 2D normal, non-connexe :

Ici, l'espace est constitué de deux morceaux qui ne se touchent pas : il n'est pas connexe. Même si ils ne se touchent pas, cette ensemble reste un espace topologique, il n'est juste pas connexe.
D'un point de vue rigoureux, un espace topologique est dit connexe si il n'est pas l'union de deux ouverts / fermés (non vides) disjoints.
Dans la même "vibe" que la connexité, parlons d'une propriété très importante en topologie : la propriété de Borel-Lebesgue. La propriété de Borel-Lebesgue est une propriété topologique des parties d'un espace topologique, tel que si cette partie respecte cette propriété, alors de tous recouvrement de cette partie par des ouverts de l'espace, on peut en extraire un sous-recouvrement fini. Bon, si de base, votre recouvrement est fini, alors cette propriété ne sert à rien. En fait, l'idée est de dire qu'il n'y a jamais besoin d'une quantité infinie d'ouverts pour recouvrir une partie respectant cette propriété.
Cette propriété peut se généraliser pour un espace entier plutôt qu'une partie. Cependant, pour un espace entier, on parle plus généralement de l'axiome de Borel-Lebesgue. En effet, un espace respecte l'axiome de Borel-Lebesgue si, pour tout recouvrement de cet espace par des ouverts de cet espace, il en existe un sous-recouvrement fini. Encore une fois, l'idée est de dire qu'il n'y a jamais besoin d'une quantité infinie d'ouverts pour recouvrir un espace respectant cette propriété.
Les axiomes de séparation
Il est possible de découper les espaces topologiques en familles, respectant certaines propriétés précises. Parmi ces découpes, la plus utilisés est la découpe en les propriétés définies par des axiomes précis : les axiomes de séparations. Un axiome de séparation est, en topologie, une propriété possible de certains ensembles topologiques, concernant la façon dont les voisinages de ces ensembles se comportent entre eux. Généralement, ses axiomes se notes avec un "T-", suivit d'un nombre allant de "0" à "5,5". Si un espace respecte un certain axiome "T-n" (ou "n" représente un numéro quelconque associé aux axiomes), on dit général qu'il est un espace "T-n". De plus, si un espace est "T-n", alors il sera "T-m", avec "m" toutes les valeurs supérieures ou égales à "n". Par exemple, tout espace "T-1" est "T-0", tout espace "T-4" est "T-0", tout espace "T-5" est "T-3"...
Le premier axiome de séparation est l'axiome "T-0". Un espace topologique est dit "T-0" (ou de Kolmogorov) lorsque, pour tout couple de points distincts de l'espace, il existe soit un voisinage du premier point ne contenant pas le deuxième, soit un voisinage du deuxième ne contenant pas le premier point. En réalité, il est assez difficile de trouver des espaces topologiques réellement utiles qui ne sont pas "T-0". Cependant, un ensemble "E" quelconque munit de sa topologie grossière n'est pas "T-0". La démonstration est assez simple : le seul voisinage d'un point quelconque dans cette topologie grossière est "E" tout entier, et le seul voisinage d'un autre point quelconque de "E" dans cette topologie grossière est... "E". Or, "E" contient ces deux points quelconques (et même tous les points de l'espace). Donc, quelque soit le point choisi, il n'existe pas de voisinage d'un de ces deux points qui ne contienne pas l'autre : cet espace n'est pas "T-0". En fait, dans un espace "T-0", il est possible de différencier deux éléments de la topologie par leur voisinage, puisque l'un des voisinages des deux élément ne contient pas l'autre. Voici la formulation mathématique de ce concept :
Ce concept nous permet d'en définir un autre très similaire : l'indiscernabilité / la discernabilité topologique. Avant de définir ce concept, définissons celui de "indiscernabilité" dans la langue française. En effet, deux choses distinctes sont dites indiscernables quand il est impossible de les différencier dans un contexte donné. En topologie, ce concept est assez similaire, à une différence prêt : le concept est fixé, et représente les voisinages. Deux éléments topologiques distincts sont dit indiscernables si tous les voisinages de l'un contient l'autre, et vice-versa. Donc, deux éléments topologiques sont topologiquement indiscernables si il n'est pas possible de différencier leur voisinage en ne ce limitant qu'à l'étude des éléments un-à-un de leur voisinage. En fait, un espace est "T-0" si tous ces éléments sont topologiquement discernables entre eux. La propriété la plus intéressante de ces espaces est donc assez simple à déduire : dans un espace "T-0", si, pour deux éléments donnés sur lesquelles nous n'avons aucune information, tous les voisinages de l'un contient l'autre (et vice-versa), c'est éléments sont en fait les mêmes. En effet, cette propriété ne s'applique que sur des éléments distincts, et donc si des éléments ne la respectent pas (et appartiennent quand même à un espace "T-0"), il ne sont pas distincts, et donc sont les exacts mêmes.
Le deuxième axiome de séparation est l'axiome "T-1", qui est assez similaire à l'axiome "T-0". Un espace topologique est dit "T-1" (ou accessible) lorsque, pour tout couple de points distincts de l'espace, il existe un voisinage du premier point ne contenant pas le deuxième ET un voisinage du deuxième ne contenant pas le premier point. En fait, dans un espace "T-0", le "ET" est un simple "OU".
Donc, on en déduit rapidement que tout espace "T-1" est un espace "T-0". Il n'y a pas beaucoup de propriétés intéressantes dans ces espaces seuls, mais nous allons en citer deux d'entre elles assez intéressantes. La première concerne les singletons. En effet, dire qu'un espace est "T-1" équivaut à dire que tout singleton d'élément de cet espace est fermé (ou ouvert-fermé). La démonstration est assez simple en considérant les propriétés basiques des fermés topologiques (présente juste ici). La deuxième concerne les points limites et points d'accumulations, dans le cas où nous les définissons de manière à ce qu'elles ne soient pas tout le temps équivalentes. Pour rappel, dans ce cas, un point d'accumulation est toujours un point limite, mais pas forcément l'inverse. Or, dans un espace "T-1", les points limites sont obligatoirement des points d'accumulations. La démonstration repose sur l'axiome de séparation "T-1" (présenté juste ici).
Le troisième axiome de séparation est l'axiome "T-2". Un espace topologique est dit "T-2" (ou séparé, ou de Hausdorff) lorsque, pour tout couple de points distincts de l'espace, il existe deux voisinages, de respectivement le premier et le deuxième point, disjoints entre eux. Donc, il existe un voisinage du premier point disjoint d'un des voisinages du second, et vice-versa. Généralement, les espaces de ce genre sont appelés par leur nom "espace séparé".
Dans ce genre d'espace, on trouve une propriété très intéressante : tout compact d'un espace séparé est fermé. La démonstration est un bon moyen de se rappeler de comment fonctionne le concept de compacité (et présente juste ici).
Les espaces métriques
Un type d'espace très utilisé en topologie est l'espace métrique. Un espace métrique est un couple représentant un ensemble quelconque, et une opération binaire sur cet ensemble pouvant s'interpréter comme la distance entre deux éléments quelconques de l'ensemble. L'ensemble peut être quoi que ce soit, tant que cette fameuse "distance" existe.
La difficulté ici consiste à définir cette fameuse "distance". Déjà, une distance représente une opération entre deux éléments "a" et "b", et qui s'interprète comme une valeur, nommée "distance" entre "a" et "b", et qui est un nombre réel positif. En général, la définition intuitive d'une distance représente un moyen de calculer quelle valeur est nécessaire pour passer d'une valeur à une autre. Cependant, au sens mathématique, cette application doit respecter quelques autres propriétés précises. En effet, en mathématiques, une distance est une loi définie sur un ensemble "E", allant de E X E vers R+, où la loi est symétrique, séparée et respecte l'inégalité triangulaire. Pour rappel, puisque la distance est une application "symétrique", alors pour une distance "d" entre deux éléments "a" et "b", l'ordre de "a" et "b" n'importe pas via l'utilisation à "d" :
D'un point de vue logique, c'est assez logique : la distance entre Paris et Lyon est la même que la distance... entre Lyon et Paris (bien évidemment, si vous utilisez la même application). De plus, puisque l'application est séparée, dire que deux éléments "a" et "b" sont a une distance de "0" équivaut à dire que "a = b". Bien que cela soit assez évident, c'est une condition nécessaire pour avoir une distance.
Finalement, il y a l'inégalité triangulaire. En effet, l'inégalité triangulaire consiste à dire que pour trois éléments quelconques "a", "b" et "c", la distance entre "a" et "c" est forcément inférieure ou égale à celle de "a" et "b" plus celle de "b" et "c". D'un point de vue intuitif, cela consiste à dire que passer de "a" à "c" directement est plus rapide que de passer par un autre point "b" au milieu.
Un exemple très simple est l'ensemble des réels munit de la valeur absolue de la soustraction. En effet, d'un point de vue intuitif, la soustraction dans "R" représente le nombre de valeurs entre deux nombres, dont on prend la valeur absolue pour le rendre positif : il s'agit intuitivement d'un espace métrique fonctionnel. Mathématiquement, il faut le démontrer avec les propriétés vues plus haut, ce qui n'est pas si compliqué (démontré ici). Par extension, cette distance permet aussi de faire un espace métrique sur "Q", "Z" et "N". Or, quelque soit un nombre "a" dans "R" et "Q", comme ces ensembles sont denses, pour tout élément "b" (tous, sans exceptions), alors il existera toujours un élément plus proche de "a" que "b". En d'autres termes, il n'existe pas "d'objet le plus proche" d'un élément quelconque de "R" et "Q" qui n'est pas lui même. Cependant, "N" et "Z" ne sont pas denses, et la valeur minimale au dessus de 0 est 1 : tout objet dans "N" et "Z" (appart 0 dans "N", qui n'en possède qu'une) possède deux objets les plus proches (qui ne sont pas eux mêmes), à une distance de "1" unité.
Avec cela, nous pouvons définir deux termes très pratiques, et très utiles avec les espaces métriques : les boules et les sphères. Ici,
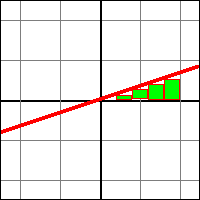
Ici, on peut se demander pourquoi avoir introduit ce concept à ce moment précis. En fait, tout espace métrique induit une topologie sur l'ensemble qu'il représente, engendré par l'ensemble des boules de l'espace.
La topologie usuelle des nombres réels
Comme les nombres réels représentent un ensemble, il est donc possible d'en obtenir un espace topologique très pratique. En effet, il est possible de définir une topologique sur l'ensemble des réels, qui est probablement la topologique la plus utile des mathématiques. Comme cette topologique est très utilisée, on l'appelle "topologie usuelle des nombres réels". Généralement, l'espace topologique usuelle formé avec "R" est aussi nommé "topologie de la droite réelle".
Ici la question est comment définir cette topologie. En fait, la topologie usuelle des nombres réels est une topologie de l'ordre. Cependant, on peut prouver que la topologie engendré par la distance fomé par la soustraction est la même que la topologie de l'ordre sur les réels.
Un théorème fondamental avec cette topologie est le théorème de Borel-Lebesgue. Le théorème de Borel-Lebesgue (aussi nommé théorème de Heine - Borel) est un théorème de topologie qui énonce que l'ensemble des parties fermés et bornés de "R exposant n" sont exactement l'ensemble des compacts de "R exposant n". Ici, le vrai défi est de prouver que les parties fermés - bornés de "R exposant n" sont compacts (car l'inverse est évident, puisque "R exposant n" est séparé, et tout compact d'un espace séparé est fermé). La première partie de la démonstration n'a lieu que dans "R exposant 1".
Considérons un segment "[a, b]" avec "a" et "b" réels, et un recouvrement quelconque de ce segment avec des ouverts. Piochons un nombre réel "x" (n'étant ni "a" ni "b") appartenant à ce segment, tel que "[a, x]" est recouvert par un nombre fini d'ouverts. Nous savons que cet intervalle a donc une borne supérieure, que nous allons nommer "c". Comme notre recouvrement recouvre "[a, b]", il existe un ouvert de ce recouvrement qui contient "c". On peut donc imaginer un nombre "d" quelconque, tel que l'intervalle "[c - d, c + d]" soit inclu dans cette partie du recouvrement contenant "c". Ici, nous pouvons poser l'intersection de "[a, b]" et "[c - d, c + d]", que nous allons noter "[e, f]". Donc, l'union de "[a, x]" et "[e, f]" donne "[a, f]", qui est lui aussi un recouvert par un nombre fini d'ouverts du recouvrement de départ (il est recouvert par le nombre fini d'ouverts qui recouvrent "[a, x]", plus l'ouvert qui recouvre "[c - d, c + d]"). Donc, "e" appartient à "[a, x]", et "f" est donc plus petit ou égal à "c". Or, "f" est aussi égal au minimum entre "c + d" et "b". Comme "d" est strictement supérieur à "0", il ne peut pas être égal à "c + d" : il est obligatoirement égal à "b", et comme "c" est supérieur ou égal à "f" mais inclut dans "[a, b]", il est forcément égal à "f", et donc à "b". Donc, la partie du segment recouverte par une quantité finie d'ouvert est en fait tout le segment.
En plus de l'espace topologique des nombres réelles, il est possible de définir un espace topologique très proche : la droite réelle achevée. La droite réelle achevée est un espace topologique sur l'ensemble des réels, auquel on ajoute deux nouvelles valeurs, représentant "+ l'infini" et "- l'infini". En fait, cette topologie contient tous les ouverts de "R", auquel on ajoute toutes les intervalles possibles contenant "+ l'infini" et "- l'infini" (qui sont eux mêmes des ouverts).
Le lien analyse - topologie
La limite topologique
En vrai, quasiment tous les concepts d'analyse peuvent êtres généralisés dans des espaces topologiques. C'est ce que nous allons faire dés maintenant.
Commençons par le concept primaire de l'analyse : la limite topologique. Grâce à toutes les définitions vues jusqu'ici, ce ne sera pas si difficile à définir. Commençons par la définition avec une suite. Une suite allant dans une partie d'un espace topologique "E" admet une limite "l" si, pour tout voisinage "V" de "l", il existe un rang "n" à partir du quel toutes les valeurs de la suite appartiennent à "V". L'idée ici est assez simple, et très proche de l'analyse. En fait, la suite admet une limite "l" si l'on peut se rapprocher autant que l'on veut de "l" (se rapprocher via un voisinage) en avançant dans la suite.
Si une suite admet une limite, elle est dite convergente. Sinon, elle est dite divergente.
On peut aussi définir une version de la limite utilisant une fonction allant d'un espace topologique vers un autre. En effet, une application entre deux parties d'espaces topologiques "E" et "F" admet une limite "l" en un point adhérent "a" de "E" si, pour tout voisinage "V" de "l", il existe un voisinage "W" de "a" tel que "f(W)" soit inclut dans "V". En fait, la fonction admet une limite "l" en "a" si l'on peut se rapprocher autant que l'on veut de "l" (se rapprocher via un voisinage) en faisant se rapprocher le paramètre de la fonction de "a" (toujours via un voisinage). Comme pour l'analyse réelle, cette définition avec les fonctions est une extension de la définition avec les suites standards, où "a" représente l'infini (que nous devons donc adjoindre à l'espace topologique du départ de la suite). Avec cette définition bien plus générale, on peut donc utiliser le concept de limite de manière bien plus étendue. D'un point de vue purement mathématique, on écrit (et on lit "pour tous voisinage "V" de "l", il existe un voisinage "W" de "a" tel que toutes valeurs de "W" (n'étant pas forcément "a") appartienent à "V"") :
Ici, une question subsiste : est-ce que nos limites réelles vues plus haut sont des limites topologiques? Malheureusement, cette question est assez complexe, et mérite quelques clarifications. Pour commencer, rappelons que nos fonctions sont des fonctions réelles, allant de "R" vers "R". Pour rappel, la topologie usuelle de "R" offre beaucoup de propriétés très intéressantes. Or, certaines limites peuvent utiliser l'infini, qui n'est pas présent dans "R", mais qui est cependant présent dans "R barre". Donc, disons donc que nos fonctions réelles vont de "R barre" muni de sa topologie usuelle vers... "R barre" muni de sa topologie usuelle.
En suite, rappelons les définitions quantifiées des limites (dans le cas où la limite se situe en un "a" fini).
Théoriquement, tous les voisinages de "a" représentent des intervalles ouverts entre "a" et "a - b" ou "a + b". Cependant, un problème se pose : si l'on rajoute "a" à ces intervalles, est-ce qu'ils représenteraient des voisinages de "a", et donc est-ce qu'ils contiendraient un ouvert contenant "a" ? Dans la topologie usuelle de "R", non : ils représentent des intervalles ouvert de frontière "a", et ne peuvent donc pas contenir de sous-ensemble contenant "a", mais pas en tant que frontière. Donc, le concept de limite à gauche / à droite seul n'est pas possible dans notre fonction utilisant la topologie usuelle de "R".
Cependant, ne nous laissons pas abattre : il existe un cas où une limite topologique existe bel et bien avec notre fonction. En effet, si la limite à droite et à gauche sont égales, alors vous pouvez changer les "]a -
Donc, formulons le concept de voisinage de "a". Déjà, les intervalles "]a - b, a + b[" sont des voisinages de "a". Or, pourrait-on faire de même dans les cas où notre "c" doit être de plus en plus grand ou de plus en plus petit ? Dans "R barre", rappelons une propriété intéressante : les intervalles de la forme "]b, + infini]" sont des voisinages de "+ l'infini", et les intervalles de la forme "[- infini, b]" sont des voisinages de "- l'infini". Donc, si l'on considére "a = + l'infini" ou "a = - l'infini", les intervalles de la forme "]b, + infini]" et "[- infini, b]" sont des voisinages de "a". On peut donc remplacer tous les "b" par "W", où "W" est un voisinage de "a" (et aussi dire que "c" n'appartient plus qu'à "R", mais à "R barre"). Si nous faisons cette étape, beaucoup des formules si dessus se répètent : écrivons toutes les formules distinctes.
Procédons en suite pour chasser le "x". Déjà, "|f(c) - v|" inférieur à "x" revient à dire que la distance entre "f(c)" et "v" est inférieur à "x", et donc que "f(c)" appartient à "]v - x, v + x[". De l'exact même manière, "]v - x, v + x[" représente un voisinage de "v", et "f(c)" supérieur à "x" ou inférieur à "-x" représente un voisinage de "v" si "v" est respectivement "+ l'infini" ou "- l'infini". On peut donc réécrire cette formule, qui ne devient qu'une formule distincte.
Nous reconnaissons la formule de la limite topologique : tous ces cas donnent donc des limites topologiques.
Cependant, le concept de limite en topologie pose un gros problème : sa définition purement topologique est assez faible, et permet des résultats très bizarres. Par exemple, il existe des topologies (bizarres) tel que des applications sur ces topologies peuvent donner plusieurs limites en une valeur. Ce résultat se base sur quelque chose d'assez simple : la définition topologique de la limite est très permissive. Prenons l'exemple général : un ensemble "X" défini comme "{a, b, c}", muni d'une topologie très simple : "{vide, {a}, {a, b}, {a, c}, X}".
Nous pouvons donc poser tous les voisinages de "a", "b" et "c" :
Posons la fonction "f" allant de "X" vers "X", transformant chaque valeur de "X" en "a".
Trouvons la limite en "b" de cette fonction. Rappelons la définition de la limite de "f" en "b" :
Donc, pour quelles valeurs de "l" existe t'il pour tout voisinage "V" de "l" un voisinage "W" de "b" tel que, pour tous "x" de ce "W", "f(x)" appartienne à "V" ? Comme nous connaissons toutes les valeurs des voisinages de "a", "b" et "c", nous pouvons très facilement répondre à cette question. Déjà, si nous tentons "l = a", nous remarquons que chaque voisinage contient "a". Ici, "f(x) = a" pour tout "x", donc pour tout voisinage "V" de "a", il existe toujours une valeur de "V" égale à "f(x)", donc "f(x)" appartient à "V" : "a" est une limite de "f" en "b". Or, une brève observation nous permet de voir quelque chose d'un peu embêtant : tous les voisinages de "b" et de "c" contiennent aussi tous "a". Donc, pour tout voisinage de "b" et "c", il existe toujours une valeur de ces voisinages égale à "a", et donc à "f(x)" (où "x" représente chaque valeur d'un voisinage de "b"), donc "f(x)" appartient à ces voisinages : "b" et "c" sont aussi des limites de "f" en "b".
Bien évidemment, il est inconcevable qu'une fonction réelle puisse possèder plusieurs limites. Cependant, il est possible de n'obtenir qu'une seule limite, de manière assez simple. En effet, toute fonction arrivant dans un espace séparé (espace "T-2") ne peut qu'admettre des limites uniques pour un point donné. La démonstration est assez simple. Imagineons qu'une fonction "f" admette une limite "l" en "a".
Supossons qu'elle admette aussi une limite "m", toujours en "a". Dans ce cas :
Comme nous sommes dans un espace "T-2", il existe un voisinage de "m" qui ne contient pas un autre voisinage de "l", et vice-versa. Donc, il existe deux voisinages de "a", que nous nommerons "B" et "C", tel que l'image de "f(B)" est incluse dans un voisinage de "l" qui ne contient pas un voisinage de "m, tel que l'image de "f(C)" soit inclut dedans. Pour rappel, une propriété des voisinages en un point est que l'intersection de voisinages en ce point forme un nouveau voisinage en ce point. Donc, l'intersection de voisinages de "a" ("B" et "C") forme un nouveau voisinage de "a", que nous nommerons "D".
Ici, quelque soit l'élément de "D", l'image ne peut être ni dans un voisinage de "l", ni dans un voisinage de "m", pusiqu'ils sont pas définition disjoints. Cependant, comme "B" admet pour image un ensemble inclu dans un voisinage de "l" et "C" admet pour image un ensemble inclu dans un voisinage de "m", quelque soit l'élément de "D", l'image ne peut être... que dans un voisinage de "l", ou de "m". Ici, nous avons donc une contradiction, et une de nos hypothèses de départ est fausse : notre fonction admet plusieurs limites en "a". Donc, toute fonction arrivant dans un espace séparé (espace "T-2") ne peut qu'admettre des limites uniques pour un point donné.
La continuité topologique
Poursuivons par un concept très utilisé en analyse : la continuité topologique. Déjà, comme pour l'analyse, une application peut être continue sur un seul point, ou sur plusieurs points. Commençons par la définition en un point. Une application entre deux espaces topologiques "E" et "F" est dite continue en un point "a" de "E" si "f" admet une limite en "a", valant "f(a)". En plus, une application entre deux espaces topologiques "E" et "F" est dite continue sur une partie de "E" si elle est continue en tous les points de cette partie. Donc, une application entre deux espaces topologiques "E" et "F" est dite continue sur "E" si elle est continue en tous les points de "E".
Pour rappel, en analyse réelle, nous avons vue qu'une application est continue en un point "a" si elle était définie en "a", et si sa limite à droite et à gauche sont égales. Comme nous l'avons vue plus haut, si une fonction a une même limite à droite et à gauche en "a", alors elle admet une limite topologique : on en conclut directement que la continuité réelle est aussi une continuité topologique. De plus, si l'espace d'arrivée de la fonction est séparé, alors sa valeur en "a" sera toujours égale à la valeur de sa limite.
Cette définition permet d'établir un théorème extrêmement intéressant avec les fonctions continues sur tout leur intervalle de définition : tout voisinage d'un point "f(a)" de l'ensemble d'arrivée admet comme antécédent un voisinage de "a". La démonstration est assez intéressante. Si une fonction est continue en "a", alors "f(a)" est une limite de "f" en "a". Par définition de la limite :
Pour tout voisinage "V" de "f(a)", il existe un voisinage de "a" tel que l'image de ce voisinage sont inclut dans "V". Comme on sait que "f(a)" appartient à "V", alors on peut enlever le "\ {a}".
Selon le concept d'image réciproque, on peut donc dire :
Si "W" est un voisinage de "a" et "W" est incluse dans l'image réciproque de "V", alors l'image réciproque de "f(V)" est un voisinage de "a". Donc, tout voisinage d'un point "f(a)" de l'ensemble d'arrivée admet comme antécédent un voisinage de "a". Ici, nous avons dit que cela fonctionne si la fonction est continue sur tout son intervalle de définition. Or, si dans un espace topologique quelconque, on peut restreindre cette fonction sur un sous-espace, et qu'elle est continue sur cet espace, alors les résultats s'appliquant aussi dans ce sous-espace. Comme ça, si votre fonction n'est continue que sur une partie d'un espace topologique, vous pouvez quand même utiliser ce théorème, grâce à une restriction.
Cette propriété a pas mal de conséquences intéressantes. Par exemple, dans une fonction continue sur tout son ensemble de définition, tout ouvert de l'ensemble d'arrivée admet comme antécédent un ouvert de l'ensemble de départ. Cela se déduit directement du fait qu'un ouvert d'un point est un ensemble de voisinages de tous ses points, qui induisent donc un ensemble de voisinages de tous les antécédents possibles, qui forment donc un ouvert. C'est la même chose pour les fermés, puisque comme son complémentaire est un ouvert (et que l'antécédent de cet ouvert est donc... un ouvert), alors son image réciproque est le complémentaire d'un ouvert, et donc un fermé.
Cependant, un théorème d'une très grande importance concerne les parties connexes. En effet, toute image d'une partie connexe par une fonction continue est une partie connexe. La démonstration générale utilise une preuve par l'absurde. Posons une fonction continue "f", "X" une partie connexe de "E", et supposons que "f(X)" est une partie non-connexe de "F". Dans ce cas, il existe deux ouverts disjoints dont l'union forme "f(X)".
, U ∩V = ∅Appelons "A" et "B" les images réciproques de "U" et "V" par "f". Comme nous l'avons vue, "A" et "B" sont des ouverts de "E", et nous pouvons en inférer leur lien avec "X".
Ici, on peut donc voir que "X = A union B". Cherchons l'intersection de "A" et "B".
Donc, "A" et "B" sont disjoints. Or, "A" et "B" ne sont pas vides, donc "X" est l'union de deux ouverts disjoints : il n'est pas connexe. Néanmoins, nous l'avons supposer connexe : c'est donc une contradiction, et une de nos hypothèses est fausse. Ici, on se rend compte que la seule hypothèse fausse est que "f(X)" ne soit pas connexe : il est donc obligatoirement connexe.
Maintenant, exposons un dernier théorème très important aussi, sur les compacts. En effet, toute image d'un espace compact dans un espace séparé par une fonction continue est un espace compact. Ici, pas besoin de preuve par l'absurde. Posons une fonction continue "f" et "E" un espace compact. Déjà, on sait que "f(E)" peut être recouvert par des ouverts de "F", avec un nombre fini ou infini d'ouverts.
Donc, on peut en déduire que "E" est inclut dans l'image réciproque de l'union de ces ouverts.
Pour rappel, "E" est compact, et l'ensemble des "V" recouvre "E", alors il existe un sous-ensemble fini des "V" qui recouvre "E".
En maniant correctement "E" et "f", on en déduit donc que "f(E)" appartient aussi un sous-ensemble fini des "V" qui le recouvre : il est donc au moins quasi-compact.
Nous pouvons mélanger l'algèbre basique et ce concept de continuité, pour obtenir des outils très puissants. L'outil de base de ce genre de mélange est le groupe topologique. Un groupe topologique est un groupe où la loi de composition interne permet dans tous les cas de former des applications continues. En fait, imaginez un groupe "E" de loi de composition interne "~" : ce groupe est dit topologique si l'ensemble des applications suivantes font continues :
L'exemple le plus simple est le groupe "(R, +)". Ici, les applications de type "(x, y)" vers "x + y" sont des additions, et sont donc continues, et l'application "x" vers "inverse de x" revient à multiplier "x" par "-1", ce qui est aussi continu. Nous pouvons aussi citer le groupe "(R*, *)", les applications de type "(x, y)" vers "x * y" sont des multiplications, et sont donc continues, et l'application "x" vers "inverse de x" revient à obtenir l'inverse de "x", ce qui est aussi continu.
Les homéomorphismes
Derrière ce terme barbare, nous allons trouver un des concepts les plus importants en topologie. Un homéomorphisme est une application continue et bijective entre deux espaces topologiques, de telle manière que la réciproque de cette application soit elle aussi continue. Ici, si ce concept contient le mot "morphisme", c'est pour une raison extraordinaire : les homéomorphismes représentent les isomorphismes d'espace topologiques.
On peut légèrement changer la définition, avec le concept d'homéomorphisme local. Un homéomorphisme local est une application entre deux espaces topologiques, tel que pour tous points de l'espace de départ, il existe (au moins) un voisinage de ce point où la restriction de l'application sur ce voisinage représente un homéomorphisme.
Ce concept va nous permettre de définir un autre concept extrêmement important en topologie : les espaces fibrés. Un espace fibré est un espace construit à partir de deux autres (nommés "base" et "fibre"), de telle manière que l'espace fibré représente l'espace de base où chaque point de la base représente une copie de la fibre. Ce concept a une définition rigoureuse un peu complexe. Considérons trois espaces topologiques séparés : "E" (espace total), "B" (espace base) et "F" (espace fibre). Posons ensuite "f" comme une surjection continue de "E" vers "B". Nous pouvons ensuite définir un ensemble "U" d'ouverts de "B", et un ensemble d'homéomorphisme (un par ouvert de "B") allant du produit cartésien d'un ouvert de "U" et de "F" vers une partie de "E", et pas n'importe laquelle : l'image réciproque de "U" par "f".